Ethernet Dominates Industrial Environments
In our world of connected things, Ethernet has emerged as the de facto wired interconnect. Industrial control manufacturers and IT professionals have embraced this standard as a means to replace aging proprietary machine control networks. There are issues in simply applying a standard designed for information exchange to real-time control, though, as well as environmental concerns with the physical hardware.
This file type includes high resolution graphics and schematics when applicable.
Background
Ethernet is ubiquitous. It can be found in various forms anywhere from our homes to the largest data centers. Its most common variations use various grades of twisted-pair wires for runs up to 100 meters (roughly 300 feet). The cable is inexpensive, and so are the physical-layer (PHY) devices used to drive it. This was the incentive for the industrial control community and IT professionals to embrace Ethernet for the factory floor and other industrial applications.
Related Articles
Many industrial applications can use Ethernet as is by simply extending the operating temperature range of the PHY interface devices as well as the rest of the system (processors, memory, and others). These applications include remote sensing, video surveillance, energy management, and other systems that are not time critical.
“Time critical” refers to a system’s dependency on a deterministic latency—or better, absolute knowledge of time to a very high degree of accuracy. This is the major difference between information exchange and control applications. Controls require determinism in when something will happen.
Time Coordination In Networks
Since the Internet protocol (IP) has dominated the underlying transport of networks including PHYs such as Ethernet, many upper-layer protocols have emerged to support time coordination. Starting with RFC958 in 1985, attempts were made to accurately maintain time in clients by communicating with servers that held the master time. RFC958 – network time protocol (NTP) has been updated to revision 3 in RFC1305. The latest protocol can in practice synchronize nodes to within 100 ms of the time server and typically will be much better on the order of 2 to 5 ms.
However, a 100-ms variability may result in a catastrophic failure in a machine control scenario. Imagine a high-speed printing press with hundreds of motors that all need to start and stop together. At top printing speeds paper is traveling at upwards of 20 miles per hour, or roughly 30 feet per second through the machine. A difference in time of 100 ms equates to 3 feet of travel, which clearly would be bad for print accuracy, let alone the physical integrity of the paper. At those speeds even a 1-ms discrepancy equates to roughly a third of an inch, which could represent a significant error.
This scenario is problematic for networks that don’t inherently have a synchronization mechanism. NTP can effectively synchronize clients to within tens of milliseconds. But for precision control, clocks need to be synchronized to within tens of microseconds, which is orders of magnitude better than what NTP can provide.
This problem inspired the IEEE to develop a new standard that was first released in September of 2002 called the Precision Time Protocol (PTP) under IEEE1588-2002. It was later revised to version IEEE1588-2008 and can run natively on 802.3 Ethernet packets (packet type 0x88F7) as well as other Ethernet-based control protocols such as EtherCAT.
The beauty of this protocol is in the achievable accuracy. It is based on Temps Atomic International (TAI), also known as International Atomic Time, which moves forward monotonically (ever increasing) and is locked to an atomic clock. With general-purpose hardware and a PTP stack, accuracies of better than 1 µs are achievable. Using specialized Ethernet switches and PHY devices such as the DP83630 that contain the IEEE1588 state machine can lock the local clock with the master with less than 10 ns of error.
Industrializing Ethernet
When designing systems for industrial automation and control that utilize Ethernet as the network interface, several factors must be considered. In most IT infrastructures, the environment is closely controlled and chassis often use forced air (fans) to maintain a cool temperature. Industrial systems often are installed in harsh environments with extreme temperatures and humidity. Forced air is not an option since the chassis are sealed from the environment.
Microprocessors used for industrial control often include the Ethernet media access controller (EMAC or simply MAC), which is digital in nature and requires very little power. However, the PHY interface is a mixed-signal device that must drive up to 100 meters of cable. The PHY must also meet this temperature requirement, which usually is defined as –40°C to 85°C. This will be the operating ambient temperature of the device, so care must be taken that the internal temperature of the chassis does not rise above (or fall below) the maximum (or minimum) rated temperatures.
Ambient temperatures in an industrial environment easily can exceed 50°C (over 120°F). This means that the inside of the box will be even hotter than that! Heat requires a temperature differential to flow, so the inside temperature easily may rise to 75°C to 80°C in this scenario, depending on the thermal impedance between the inside and outside of the chassis. This is why commercial PHY devices cannot be used. Typically they are limited to a maximum operating temperature of 70°C.
Because some connectors are exposed to the outside world, electrostatic discharge (ESD) damage can occur to the interface. The international standard IEC61000-6-2 defines the minimum requirements for many of the ports on industrial equipment and requires at least 8 kV of immunity from permanent ESD damage. A shielded RJ-45 connector is highly recommended to limit exposure to ESD and unintended radiation, as well as susceptibility to noise.
Practical Implementations
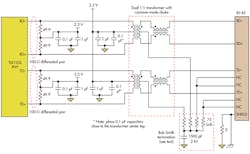
To illustrate these good practices, the example in the figure utilizes a Texas Instruments TLK105L 10/100 industrial Ethernet PHY. This device meets the extended temperature range and includes hooks for IEEE1588 time synchronization. It also has an extremely high 16-kV ESD rating on the Ethernet port.
{kind=link}
The RJ-45 jack is connected to the magnetics and then to the PHY. Care must be taken to keep the 100-Ω differential pair termination resistors and capacitors as close to the PHY as possible. The Bob Smith termination configuration is used to suppress noise caused by common-mode ac current flows and noise present on unused pairs (not applicable to 802.3af PoE applications). For more information on Bob Smith termination, see U.S. Patent 5321372.
Conclusions
Ethernet is quickly becoming the new de facto standard for industrial control, thanks to several key advances. These include higher-temperature Ethernet PHY devices that also implement time synchronization protocols such as IEEE1588-2008, while providing increased ESD protection from the harsh environments found on the factory floor.
Systems can either utilize CAT5e twisted-pair cable for up to 1-GHz full-duplex speeds over 100 meters or use fiber for longer runs while increasing isolation and noise immunity. By adding the proper protocols, automation systems utilizing Ethernet networking now rival their proprietary industrial counterparts in performance and most likely will replace them in the future.
References
1. Here’s more information about industrial automation.
2. Check out this info on ESD.
3. Download these datasheets: DP83630, TLK105L.
Richard Zarr is a technologist at Texas Instruments focused on high-speed signal and data path technology. He has more than 30 years of practical engineering experience and has published numerous papers and articles worldwide. He is a member of the IEEE and holds a BSEE from the University of South Florida as well as several patents in LED lighting and cryptography.
About the Author
Richard F. Zarr
Richard Zarr is a technologist at Texas Instruments focused on high-speed signal and data path technology. He has more than 30 years of practical engineering experience and has published numerous papers and articles worldwide. He is a member of the IEEE and holds a BSEE from the University of South Florida as well as several patents in LED lighting and cryptography.
Comment About the Article
To join the conversation, and become an exclusive member of Electronic Design, create an account today!

Leaders relevant to this article: