Understanding Resolution In Optical And Magnetic Encoders
Download this article in .PDF format
Rotary encoders convert rotary movement or angular position into analogue or digital signals for use in measurement or control systems. They can be classified in a number of ways, primarily by the type of output they provide, either absolute or incremental.
The incremental signal consists of two phase-shifted, square-wave signals. The phase shift is required to recognize of the direction of rotation. The absolute signal consists of discreet coded binary values and may be from 4 to 16 bits wide.
Related Articles
- Universal Magnetic Position Encoder Includes Linear Hall Sensors
- Magnetic Rotary Encoder Enhances Battery-Powered Designs
- Improved Encoders Create New Possibilities In The Motion Control Industry
In application, absolute encoders are required if a particular setting must be recognized and available after the system powers down. All other applications can use an incremental encoder. Encoders also can be classified by the sensor technology employed, which may use mechanical contacts or, more likely these days, contactless optical or magnetic sensors.
The applications for encoders are extremely wide-ranging, including consumer, automotive, industrial, and medical. Encoders essentially provide one of two functions, enabling a human machine interface (HMI) or a machine-to-machine interface (MMI).
In HMI applications, encoders often are encountered in panel controls, where they are commonly regarded as the digital version of a potentiometer. A less obvious but increasingly popular use is in control lever or pedal assemblies, replacing mechanical cables or rod linkages, e.g., automotive throttle control.
In MMI applications, encoders invariably are used as part of a feedback control system, where they count spindle revolutions or monitor speed. Many systems feature encoders that close the loop on an HMI input. So in automotive throttle controls, a second encoder is likely to measure engine speed (rpm) to control fuel injection and engine timing to achieve the desired acceleration. Or, it could measure the position of a rudder on a boat to ensure it corresponds to the setting at the helm.
How Do They Work?
Magnetic encoders use a combination of permanent magnets and magnetic sensors to detect movement and position. A typical construction uses magnets placed around the edge of a rotor disc attached to a shaft and positioned so the sensor detects changes in the magnetic field as the alternating poles of the magnet pass over it.
The simplest configuration would have a single magnet, with its north and south poles on opposite edges of the rotor, and a single sensor. Such a device would produce a sine wave output with a frequency equal to the rotational speed of the shaft.
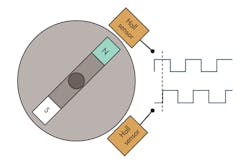
With a second sensor, set 90° apart from the first and therefore generating a cosine output, it becomes possible to not only detect the direction of rotation but also to interpolate the absolute position of the shaft from the sine and cosine signals (Fig. 1). For incremental encoders, the sinusoidal outputs from the sensors are converted to square waves so the resulting quadrature waveforms can only be encoded to one of four possible angular positions. Greater resolution is achieved by increasing the number of magnetic poles around the rotor and by having more sensors. For example, 1024 positions (or 10-bit resolution) can be achieved with four sensors and 128 poles.
Optical encoders use a rotor disc made of plastic or glass that is patterned with transparent and opaque areas that can be detected as the disc rotates between a light source and a photodetector. Like the magnetic encoder, the simplest configuration might use just one sensor and have one half of the disc transparent and the other half opaque. But for higher resolution, the disc is usually divided into many more segments (often in concentric rings) with two or more sensors.
Again, an appropriate arrangement of rotor pattern and sensor position can provide the quadrature output that characterizes incremental encoders. To minimize pin count, the data from an absolute encoder is usually output serially. And while most commercial encoders are rotary, the same sensing and coding principles also can be applied to linear encoders.
Choosing An Encoder
From a user’s perspective, the technology behind an encoder (magnetic or optical) is only relevant if it determines the performance that can be achieved. Particularly when employed as part of an MMI, the encoder undergoes mechanical stress and has to function also while on fast rotation.
Therefore, having determined whether incremental or absolute encoding is required, the key selection criteria are rotational speed, measured in rpm, and angular resolution, either quoted as the number of positions per revolution or the equivalent number of bits.
Of course, if the intended application is going to subject the encoder to extended use at high speeds, some consideration of life expectancy is appropriate, i.e., choosing an encoder with suitable high-performance ball bearings. Beyond this, normal considerations of quality, reliability, and price will apply.
Rather than considering these factors from an abstract position, it is easier to look at a number of representative products from various manufacturers to understand their advantages in the types of applications they target.
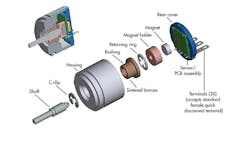
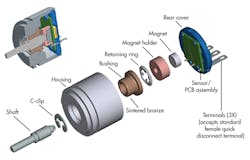
Bourns makes both magnetic and optical encoders for heavy-duty applications in tough environments such as industrial, medical, and military. The AMS22S single-turn, magnetic rotary encoder is highly resistant to vibration or shock and the ingress of fluid or dust. The robust design’s sturdy mechanical construction resists side loads and axial forces acting on the shaft (Fig. 2).
The encoder uses a programmable quad Hall effect IC to measure rotational angle, which can output either as a linear analogue voltage or a pulse-width modulation (PWM) waveform, in both cases with 12-bit resolution. These are factory pre-set options, as is the output voltage range, which can be programmed between 1% and 99% of VDD and the effective electrical angle, which can be defined between 10° and 360° in 10° increments.
From an environmental and mechanical perspective, the AMS22S is specified for an operating temperature from –40°C to 125 °C with a rotational life of 50 million revolutions at speeds up to 120 rpm. Target applications include controls (valves, pedals, steering), geared dc servo motor systems, and camera pan/tilt positioning.
For absolute encoding with a digital output, Bourns offers the EMS22A, which is also a non-contacting magnetic encoder. It has 1024-position angular resolution with the data output serially as a 10-bit code. It suits harsh environments and, because it uses a ball bearing, can operate up to 10,000 rpm.
Factory ordering options allow for 3.3- or 5-V supply, clockwise or anti-clockwise coding, different bushing types, and various shaft style/length and terminal configurations. Target applications include industrial automation, robotics, and automotive.
Bourns also manufactures optical encoders for incremental applications where a simple two-channel quadrature output, for interfacing directly to microcontrollers without analog-to-digital conversion, is sufficient to measure rotational position changes or speed.
The EN series includes a ball-bearing bush option, supporting shaft speeds to 3000 rpm, and a rotational life of 200 million revolutions or a regular spring-loaded bush (for optimum feel) that is good for 300 rpm and 10 million revolutions. Different ordering codes allow a choice of resolution from 25 to 256 positions (i.e., 8-bit) as well as various mechanical and electrical termination options.
Bourns’ EM14 optical encoder, with push switch, is designed for less demanding applications, with an operating temperature range from –40°C to 70°C, a maximum speed of 120 rpm, a life of 2 million revolutions (at 30 rpm), and a maximum positional resolution of just 64 pulses/revolution. These optical encoders primarily target HMI applications like panel-mount controls in test and measurement equipment and audio products.
Vishay also manufactures magnetic rotary encoders. All of its products provide either a linear analogue or PWM output from a single signal wire, like the Bourns AMS22S. The Vishay 981HE targets harsh environments and is intended for throttle position sensing, so it has the widest operating temperature range (–40°C to 125°C) and enhanced performance in terms of vibration, shock, and immunity to electromagnetic interference (EMI). It is rated for 120 rpm and a life of greater than 10 million cycles (for the D-shaft model).
The Vishay 34THE 10-turn servo encoder measures angles up to 3600° with 12-bit resolution. It targets “off-road” steering and actuator applications. The servo model has ball bearings to provide long life (50 million cycles).
Vishay’s 50SHE single-turn, 120-rpm, servo-mount model is the company’s smallest unit, measuring 12.7 mm in diameter and 19.5 mm long. Like the 981HE, it targets harsh environments, but ball bearings provide a longer 50 million-cycle life. The 351HE 120-rpm, single-turn, bush-mount encoder has a more conventional 22-mm diameter body and generally a lower specification compared to the 50SHE.
Where Vishay favours magnetic encoders, Grayhill offers a very wide range of optical encoders. Like the Bourns’ optical encoders, they are 2-bit, incremental, quadrature code output devices.
In the MMI area are the 61K and 63K models, for example, which represent the low- and high-end performance options in terms of speed and life cycles. Both feature four-pin connections and resolution up to 256 positions/revolution, but the 61K is a 300-rpm part, specified for 10 million cycles, while the 63K uses ball bearings to achieve 5000 rpm and 300 million cycles.
While this article mainly covers MMI products, we should mention that Grayhill offers one of the broadest spectrums of optical HMI solutions, including highly integrated components like the NavCoder and the Multiturn Ring Encoder.
Conclusion
Rotary encoders are used to measure angular position or speed for control and feedback purposes across a wide range of applications, spanning the industrial, automotive, medical, and consumer markets. Modern designs favour non-contact sensing methods, either magnetic or optical, for improved reliability, performance, and life expectancy.
In practice we find the optical types cover the requirement for incremental, quadrature output signals to simply measure position change or rotational speed, while the magnetic types typically provide absolute position information. Although not a fundamental limitation in the design of optical encoders, none of the models considered offer more than 256-position (8-bit) resolution whereas the magnetic types feature 10- and 12-bit resolution models.
Beyond this, the differentiation lies in the maximum speed and life expectancy of the encoder (primarily determined by bearing type), other environmental factors (e.g., temperature range), and physical attributes such as their dimensions, electrical terminals, and ruggedness (shock, vibration, etc.). Last but not least will be the cost consideration. Clearly, high performance, long life, and ruggedness all come at a price.
Giovanna Monari has a degree in electronic engineering and has worked for seven years at Avnet Abacus as product manager for e-mech products.
CAPTIONS
1. A magnetic rotary encoder comprises two poles and two sensors. The second sensor makes it possible to not only detect the direction of rotation but also to interpolate the absolute position of the shaft.
2: Bourns’ AMS22S single-turn, magnetic rotary encoder resists side loads and axial forces acting on the shaft.
About the Author
Giovanna Monari
Product Manager for e-mech Products
Giovanna Monari has a degree in electronic engineering and has worked for seven years at Avnet Abacus as product manager for e-mech products.
Comment About the Article
To join the conversation, and become an exclusive member of Electronic Design, create an account today!

Leaders relevant to this article: