BeagleBone Robots Takes a Bite of Bluetooth

Download the PDF of this article.
A pleasant surprise for me at Embedded World this year was BeagleBoard.org’s BeagleBone Blue (Fig. 1). It targets robots and mobile embedded devices with plenty of control interfaces and Bluetooth connectivity.

1. The BeagleBone Blue uses Octavo Systems’ OSD3358 System-in-Package (SiP) based on Texas Instruments’ Sitara ARM Cortex system-on-chip (SoC).
What I like about the BeagleBone family is its open-source industrial design and integrated software that gets developers started more quickly than most other platforms in this space. I have used the BeagleBone Black in the past and look forward to trying out the new BeagleBone Blue.
The $79 BeagleBone Blue runs a 1-GHz Octavo Systems OSD3358 that is a System-in-Package (SiP). The SiP is built around Texas Instruments’ (TI) Sitara AM3358 system-on-chip (SoC) that has an ARM CortexA8 core. The 27-mm by 27-mm SiP contains 512 Mbytes of DDR3 RAM and integrated power management. The AM3358 has a 12-bit, 8-channel SAR ADC, gigabit Ethernet support, a pair of USB 2.0 host/OTG with PHY, and an LCD controller with 3D graphics support. It also has a pair of 32-bit 200-MHz programmable real-time units (PRUs).
The board has 4 Gbytes of eMMC flash storage programmed with Debian Linux. It also has an ARM Cortex-M3. There is a two-cell LiPo battery socket with balancing, 9-18V charger input support. The board adds 802.11bgn, Bluetooth 4.1, and BLE wireless.
The motor control ports are extensive, with eight 6V servo outputs, four DC motor outputs, and four quadrature encoder inputs. Sensors include a nine-axis IMU and a barometer. There are 11 user-programmable LEDs and a pair of user-programmable buttons. There are connections for GPS and DSM2 radio. About half the board is relegated to connectors.
The BeagleBone Blue is already finding a home in robots and drones (Fig. 2). The EduMiP is a self-balancing robot. It is an open source project on GitHub where the 3D print files are stored. The BeagleMAV is a three-printed hexacopter. BeagleMAV only weighs 500 grams (1.1 lb.). The monocoque structure was designed iteratively using modal finite element analysis at DroneLab at the University of California in San Diego.
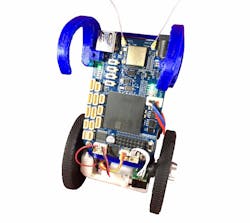

2. The BeagleBone Blue is ideal for robots like the EduMiP (a) and drones like the BeagleMAV (b).
Octavo Systems OSD335x is available separately with up to 1 Gbyte of DRAM. It can handle 0 to 85°C. The 400 ball BGA has a 1.27 mm pitch. The BeagleBone TH Module is a more compact module with the OSD3358 SiP.
There is also a BeagleBone Black Wireless with Wi-Fi support and a wireless BeagleBone Green from Seeed Studio. The BeagleBone Black Wireless has the same headers as the original BeagleBone Black, as does the BeagleBone Green. The BeagleBone Black Wireless also uses the Octavo Systems SiP, while the other uses the TI chip directly.

About the Author

William G. Wong
Senior Content Director - Electronic Design and Microwaves & RF
I am Editor of Electronic Design focusing on embedded, software, and systems. As Senior Content Director, I also manage Microwaves & RF and I work with a great team of editors to provide engineers, programmers, developers and technical managers with interesting and useful articles and videos on a regular basis. Check out our free newsletters to see the latest content.
You can send press releases for new products for possible coverage on the website. I am also interested in receiving contributed articles for publishing on our website. Use our template and send to me along with a signed release form.
Check out my blog, AltEmbedded on Electronic Design, as well as his latest articles on this site that are listed below.
You can visit my social media via these links:
- AltEmbedded on Electronic Design
- Bill Wong on Facebook
- @AltEmbedded on Twitter
- Bill Wong on LinkedIn
I earned a Bachelor of Electrical Engineering at the Georgia Institute of Technology and a Masters in Computer Science from Rutgers University. I still do a bit of programming using everything from C and C++ to Rust and Ada/SPARK. I do a bit of PHP programming for Drupal websites. I have posted a few Drupal modules.
I still get a hand on software and electronic hardware. Some of this can be found on our Kit Close-Up video series. You can also see me on many of our TechXchange Talk videos. I am interested in a range of projects from robotics to artificial intelligence.
Comment About the Article
To join the conversation, and become an exclusive member of Electronic Design, create an account today!

Leaders relevant to this article: