
Download this article as a .PDF
Parrot recently announced the Disco-AG (Fig. 1), designed for users who plan on flying drones for profit rather than fun. Designed for the agriculture market, this drone flies a preprogrammed path over farmland recording details that can be analyzed once the drone lands.
The Disco-AG is a single drone that will fly a fixed flight path and then land. While it’s possible to have a pair flying in adjacent fields, they would not communicate with each other and could potentially collide (there are no collision avoidance sensors on the drones, either). Using a swarm of drones would be an efficient way to quickly map a larger area that a single drone would be incapable of handling…and this is where swarm robotics comes into play.

Swarming robots is not a new idea, but you need at least two to do something, and that costs twice as much as one. Going with small and low-cost robots is one way of doing research on a budget. That was the idea behind the Kilobot.
The Kilobots has a mere 33-mm diameter (Fig. 2), just enough to fit a battery. Its three legs use vibration from a piezoelectric engine to move on a flat surface. It can communicate with siblings up to 7 cm away and it can determine their distance and direction. They can run for 2.5 hours on a 3-hour charge. A tab on top is used for charging when Kilobots swarm a charging station.
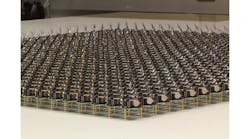
K-Team sells a Kilobot for about $132 each, although they have about $14 in parts. Swarms with more than a thousand Kilobots have been used in research projects.
Of course, simulations can be used at a significantly lower cost. Still, simulations can only take research so far. Part of the challenge with them is the degree of accuracy in replicating the simulated environment. NVidia’s Issac Initiative is simulation environment that is being designed to handle swarms in a fine degree of accuracy in replicating the simulated environment.
Cost actually affects large companies like Intel, but its “Shooting Star” research platform does not skimp because of cost (see “Build Your Own Drone on Intel’s Platform”). These drones look like conventional quadcopters (Fig. 3), but they are not designed to just fly solo. The drone weighs in at 280 g and has a 20-minute flight time. It has a maximum range of 1.5 km and a flight speed using GPS of 10 m/s. It needs to slow down to 3 m/s when used in light show mode.

Light shows are what a swarm of Shooting Stars were made for (Fig. 4). Hundreds have entertained people at events like the Super Bowl where 300 were used. The drones have a set of bright LEDs that are used for the light show. Software simplifies the presentation process by determining how many drones are needed for an action, with a single computer used to control the swarm.

Most of the work for swarm coordination is done by the ground control PC, but the drones are autonomous. They use GPS to determine their position and to avoid adjacent drones rather than collision avoidance hardware and software. Fully autonomous drones would have more complex hardware and software. That is interesting for other problems or research, but not necessary for this purpose.
Swarm technology has applications for things other than light shows. For example, self-driving truck convoys are a simple form of swarms that use a follow-the-leader technique. A much more ambitious example is Lockheed Martin’s “loyal wingman” research program for the U.S. Air Force Research Laboratory’s (AFRL) using F-16 fighters as a drone (Fig. 5).

We are still a long way from ultra-smart, talking aircraft like EDI in the movie "Stealth," but the F-16 will follow a manned aircraft in formation. It can be tasked with attack and defense chores that it will fulfill on its own. The on-board computers handle everything from navigation to planning and execution.
The U.S. Air Force has over a thousand F-16 and F-35A aircraft that could be converted to autonomous drones. These would not necessarily be as functional as a drone specifically designed for this task, but aircraft are very expensive items, and even the testing and verification of an aircraft is a significant cost.
These platforms differ from the thousands of remotely piloted aircraft like the Reaper drones, which U.S. pilots can control from as far away as 7,000 miles. These already support limited autonomous operation and are usually flown singularly for chores like reconnaissance.
Swarm robots will often utilize machine learning neural networks for chores such as object recognition, using sensors from radar to cameras. Artificial neural nets (ANN) can also be used for planning and swarm response to events and tasks. Keep in mind that the underlying technology for supporting neural networks will be similar, but the actual implementations will be quite different.
There remain significant areas of research, from flocking to self-assembling networks. Swarms are becoming more complex and heterogenous mixes are becoming more common. A drone aircraft dropping hundreds of microdrones, like the Perdix (Fig. 6), will not be unheard of.

Strategic Capabilities Office of the United States Department of Defense worked with MIT’s Lincoln Laboratory to come up with the Perdix. The drone’s processor is designed to link with others in the swarm to support a collective intelligence. The loss of one or more drones will not cripple the swarm.
Liquid Robotics’ Wave Gliders (Fig. 7) are unmanned surface vehicles (USVs) that are designed to operate solo or as a swarm.

The Java-based Regulus Intelligent Vehicle Software delivers autonomous operation and management of the on-board sensor packages. Applications and data can be distributed among Wave Gliders. The system helps applications adjust when a Wave Glider is added or removed from the group.
The Wave Glider Management System (WGMS) is designed to handle multi-user, multi-vehicle, and multi-mission chores. Often a set of Wave Gliders will be processing sensor information for a variety of applications, since running a large number of robots over a large area is not something that is fast or inexpensive.
Singular robots will remain the norm for most applications, be it self-driving cars or farm fresh flying reconnoitering drones, but swarms will be more common. The software is significantly more complex and even the logistics can be a chore. (Imagine charging or replace batteries on a thousand flying drones.) This aspect of system management does bring up a host of new challenges. On the plus side, it can improve the solo robot operation. I know changing batteries in my drone is a pain.

About the Author

William G. Wong
Senior Content Director - Electronic Design and Microwaves & RF
I am Editor of Electronic Design focusing on embedded, software, and systems. As Senior Content Director, I also manage Microwaves & RF and I work with a great team of editors to provide engineers, programmers, developers and technical managers with interesting and useful articles and videos on a regular basis. Check out our free newsletters to see the latest content.
You can send press releases for new products for possible coverage on the website. I am also interested in receiving contributed articles for publishing on our website. Use our template and send to me along with a signed release form.
Check out my blog, AltEmbedded on Electronic Design, as well as his latest articles on this site that are listed below.
You can visit my social media via these links:
- AltEmbedded on Electronic Design
- Bill Wong on Facebook
- @AltEmbedded on Twitter
- Bill Wong on LinkedIn
I earned a Bachelor of Electrical Engineering at the Georgia Institute of Technology and a Masters in Computer Science from Rutgers University. I still do a bit of programming using everything from C and C++ to Rust and Ada/SPARK. I do a bit of PHP programming for Drupal websites. I have posted a few Drupal modules.
I still get a hand on software and electronic hardware. Some of this can be found on our Kit Close-Up video series. You can also see me on many of our TechXchange Talk videos. I am interested in a range of projects from robotics to artificial intelligence.
Comment About the Article
To join the conversation, and become an exclusive member of Electronic Design, create an account today!

Leaders relevant to this article: