Miniaturized Robots Combine Engineering, Biological, and Manufacturing Technologies

A robot intended for miniaturization is the Delta type that uses three individually controlled and lightweight arms to guide a platform to move fast and accurately in three directions. The platform is either used as a stage, similar to the ones being used in flight simulators, or coupled to a manipulating device that can, for example, grasp, move, and release objects in prescribed patterns.
A milliDelta robot was developed by Robert Wood’s team at Harvard’s Wyss Institute for Biologically Inspired Engineering and John A. Paulson School of Engineering and Applied Sciences (SEAS). By integrating their microfabrication technique with high-performance composite materials that can incorporate flexural joints and bending actuators, the milliDelta can operate with high speed, force, and micrometer precision, which make it compatible with a range of micromanipulation tasks in manufacturing and medicine.
In 2011, inspired by pop-up books and origami, Wood’s team developed a micro-fabrication approach that enables the assembly of robots from flat sheets of composite materials. Pop-up MEMS (microelectromechanical systems) manufacturing has since been used for the construction of dynamic centimeter-scale machines that can simply walk away, or, as in the case of the RoboBee, can fly. In their new study, the researchers applied their approach to develop a Delta robot measuring a mere 15 mm-by-15 mm-by-20 mm.
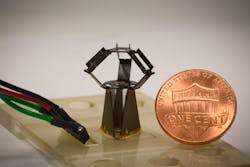
Completely unfolded, the milliDelta with 15 mm-by-15 mm-20 mm roughly compares to a penny, and uses piezoelectric actuators and flexural joints in its three arms to control high-frequency movements of a stage on top. (Credit: Wyss Institute at Harvard University)
“The physics of scaling told us that bringing down the size of Delta robots would increase their speed and acceleration, and pop-up MEMS manufacturing with its ability to use any material or combination of materials seemed an ideal way to attack this problem,” said Wood, who is a Core Faculty member at the Wyss Institute and co-leader of its Bioinspired Robotics platform. Wood is also the Charles River Professor of Engineering and Applied Sciences at SEAS. “This approach also allowed us to rapidly go through a number of iterations that led us to the final milliDelta.”
The milliDelta design incorporates a composite laminate structure with embedded flexural joints that approximate the more complicated joints found in large-scale Delta robots. “With the help of an assembly jig, this laminate can be precisely folded into a millimeter-scale Delta robot. The milliDelta also utilizes piezoelectric actuators, which allow it to perform movements at frequencies 15 to 20 times higher than those of other currently available Delta robots,” said first-author Hayley McClintock, a Wyss Institute Staff Researcher on Wood’s team.
In addition, the team demonstrated that the milliDelta can operate in a workspace of about seven cubic millimeters and that it can apply forces and exhibit trajectories that, together with its high frequencies, could make it ideal for micromanipulations in industrial pick-and-place processes and microscopic surgeries such as retinal microsurgeries performed on the human eye.
The work by Wood’s team demonstrating the enhanced speed and control of their milliDelta robot at the millimeter scale opens entirely new avenues of development for industrial and medical robots, which are currently beyond the reach of existing technologies.
Putting the milliDelta’s potential for microsurgeries and other micromanipulations to a first test, the researchers explored their robot as a hand tremor-cancelling device. “We first mapped the paths that the tip of a toothpick circumscribed when held by an individual, computed those, and fed them into the milliDelta robot, which was able to match and cancel them out,” said co-first author Fatma Zeynep Temel, Ph.D., a SEAS Postdoctoral Fellow in Wood’s team. The researchers think that specialized milliDelta robots could either be added on to existing robotic devices, or be developed as standalone devices like, for example, platforms for the manipulation of cells in research and clinical laboratories.
“The work by Wood’s team demonstrating the enhanced speed and control of their milliDelta robot at the millimeter scale opens entirely new avenues of development for industrial and medical robots, which are currently beyond the reach of existing technologies. It’s yet another example of how our Bioinspired Robotics platform is leading the way into the future,” said Wyss Institute Founding Director Donald Ingber, M.D., Ph.D., who is also the Judah Folkman Professor of Vascular Biology at HMS and the Vascular Biology Program at Boston Children’s Hospital, as well as professor of bioengineering at SEAS.
Other authors on the study are Neel Doshi, a SEAS Graduate Student, and Je-sung Koh, Ph.D., a former postdoctoral fellow on Wood’s Wyss Institute/SEAS team and now assistant professor at Ajou University in Korea. The work was funded by Harvard’s Wyss Institute for Biologically Inspired Engineering and a National Defense Science and Engineering Graduate Fellowship.
Max Planck Institute Robot
Scientists from the Max Planck Institute for Intelligent Systems in Stuttgart have developed a minuscule, flexible robot that can master a variety of forms of movement. Its magnetic drive allows it to walk, crawl, and roll through difficult terrain. Moreover, it can transport small loads and swim on and in liquids. In the future, tiny robots moving in this way could transport medication specifically to where it is needed.
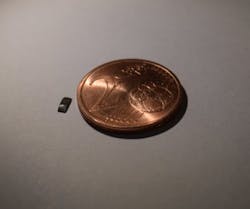
The silicone rubber strip with embedded magnetic particles forming the body of the very maneuverable millirobot is only 4 mm long. (Credit: MPI for Intelligent Systems)
The millirobots are characterized by their maneuverability. The tiny vehicle, a strip of elastic silicon just 4 mm long, can be used in a variety of locomotion modes, allowing the millirobot to maneuver even through a complex environment. Previous microrobots, on the other hand, can only maneuver to a limited extent and meet their match especially in difficult terrain.
The researchers from the Max Planck Institute for Intelligent Systems found inspiration for the development of the maneuverability talent in nature. "When we build robots, we look at the mechanics of the movement of soft-bodied biological organisms, for example, and are inspired by them," said Metin Sitti, director of the Physical Intelligence Department. "With our millirobot, the result is a mix of several soft creatures such as beetle larvae and caterpillars. However, a spermatozoid and a jellyfish also served as models."
The robot is able to perform the different movements because the scientists have embedded magnetic microparticles in its soft, elastic silicone rubber body, resulting in a precisely defined magnetization profile. This allows the researchers to operate and control it using an external magnetic field. By varying the strength and direction of the magnetic field, they deform the rubber strip in different ways. This allows the millirobot to complete an obstacle course similar to what would be encountered in the human body: it can walk or roll across surfaces, jump across obstacles, crawl through narrow tubes and swim on or in liquids. In addition, it can grasp objects, transport them and deposit them at defined locations.
Sitti's team tested the millirobot in a synthetic surgical stomach model and in chicken-meat tissue, where the artificial multi-talent demonstrated excellent results. When the researchers could not observe it directly, they tracked where and how exactly the robot made its way forward using ultrasound imaging. Great challenges still need to be overcome before such a millirobot can be used in patients: for example, it needs to prove that it can be controlled within the human body. However, the researchers are confident that these hurdles can be taken.
"Our objective is that our millirobot will one day transport medication to where it is needed—similar to a parcel delivery to the front door," said Metin Sitti. "We aim to use it in minimally invasive medical procedures on the patient: either by swallowing the robot or by inserting it into the body through a small opening on the skin. From there, the robot can then move through the digestive tract or the bladder, or on to the heart—we envisage numerous possibilities."
Research on mobile microrobots, which may be deployed in medicine in the future, plays a central role in the Department of Physical Intelligence. The hope of the Max Planck researchers is that cable-free, mobile robots will one day become established in medicine and open up new disease treatment and surgical perspectives, which are not possible at the moment.
With the aid of such millirobots, a surgeon would have direct access and precise control in areas of the body that can only be penetrated using a scalpel today. "Without surgery, it is currently not possible to gain access to many areas of the body. Our objective is to make these regions accessible non-invasively using our soft millirobot to perform diagnosis and therapy," said Metin Sitti.
Medical Robots
Robotic or robot-assisted surgery can give doctors better vision, precision, flexibility, and control when performing complex minimally invasive procedures. Someday, surgeons will even use robotic tools to operate through the internet, bringing modern medical techniques to remote parts of the world.
Several medical robots are used in a wide range of surgical applications, from neurosurgery to radiosurgery, even in pediatrics and orthopedics. But medical robots are not confined only to a surgical role. In Israel, a miniature robot called ViRob was developed in order to crawl through the human body, locate a tumor, and treat it with drugs (announced in 2009). Measuring only 1 mm long and 4 mm from end to end, the robot uses tiny arms controlled by an electromagnetic field to propel its way through different cavities of the human body, looking for deadly tumors to treat.

Here is a prototype of the tiny ViRob from Microbot, which will allow surgeons to send a camera, medication, or shunts into narrow, twisting parts of the body. (Photo courtesy of Technion)
ViRob can of travel up to 9 mm per second through blood vessels, the digestive tract, and the respiratory system. Travel is facilitated by external magnetic fields that doctors say will not cause harm to the body. It has tiny arms that are capable of grabbing onto walls within the body, allowing it to burrow from blood vessels into organs.
Within the organ, ViRob could eventually be used to administer medicine or perform delicate procedures with minimal invasion. Researchers are eventually hoping that they will be able to outfit the robot with a miniature camera, tongs, or blades. With those, ViRob will be able to go into the body and directly administer medicine to tumors, retrieve biopsy samples, or take a few pictures for curious doctors.
A problem for ViRob’s size is the crawling and burrowing mechanisms. It seems that a millimeter diameter hole in any organ would not be a pleasant experience and that it could possibly cause damage as the robot enters and exits various organs in routine checkups. The same could be said about the feet with which ViRob grabs onto the tissue. While it might not damage too many cells, a malfunctioning robot could wreak havoc inside of the body.
Although the ViRob will probably not be the robot that invades the body and cures diseases, it still deserves mention. The research done in this project could be directly applied to future solutions that are more practical.
About the Author

Sam Davis
Sam Davis was the editor-in-chief of Power Electronics Technology magazine and website that is now part of Electronic Design. He has 18 years experience in electronic engineering design and management, six years in public relations and 25 years as a trade press editor. He holds a BSEE from Case-Western Reserve University, and did graduate work at the same school and UCLA. Sam was the editor for PCIM, the predecessor to Power Electronics Technology, from 1984 to 2004. His engineering experience includes circuit and system design for Litton Systems, Bunker-Ramo, Rocketdyne, and Clevite Corporation.. Design tasks included analog circuits, display systems, power supplies, underwater ordnance systems, and test systems. He also served as a program manager for a Litton Systems Navy program.
Sam is the author of Computer Data Displays, a book published by Prentice-Hall in the U.S. and Japan in 1969. He is also a recipient of the Jesse Neal Award for trade press editorial excellence, and has one patent for naval ship construction that simplifies electronic system integration.
You can also check out his Power Electronics blog.
Comment About the Article
To join the conversation, and become an exclusive member of Electronic Design, create an account today!

Leaders relevant to this article: