Recent electromechanical breakthroughs are helping the injured to walk and eat. They also are giving workers tools that allow them to do more. The same technology is being employed in all of these areas, although what is being accomplished is often different.
For example, exoskeletons are helping the injured learn to walk by providing just enough support to make movement possible. They also are helping to strengthen muscles with enough exercise without overwhelming the patient. Amputees are now living and working thanks to prosthetic devices and exoskeletons. Or, patients may have limbs that aren’t capable of normal use without augmentation. Finally, these tools can provide people with superhuman strength, longer reach, and more durability, allowing them to complete tasks that a person could never perform alone.
Augmenting the Hand
Ever wish you had an extra hand or an extra finger or two? Developed at the Massachusetts Institute of Technology, “supernumerary robotic fingers” might be what you need (Fig. 1).

Many devices simply mimic human capability so users can move normally. Others provide more features so jobs that were once impossible can be performed easily. In this case, MIT’s Department of Mechanical Engineering added two large fingers to a glove. It lets users do things like hold an object with a couple of fingers while using the others to perform another job such as adding salt to a cup of liquid or opening the top of a jar.
Faye Wu, a graduate student at MIT, tracked how the hand and robotic joints moved to perform various tasks. She found that the various grasps could be defined by a combination of two or three general patterns using the seven fingers. The system uses an algorithm that essentially teaches the robotic components to move based on human hand movements.
The system is attuned to the user since grasping and control gestures will differ between people. The device needs to work naturally with each user. This adaptive nature is similar to voice recognition systems that can improve their usefulness over time. Future research will address the positioning of the robotic fingers as well as the amount of force being used, which would allow delicate or forceful work.
Getting a Grip with RoboGlove
Sometimes a few fingers are just enough, but they can get tired doing hard or repetitive jobs. This is true on Earth as well as in space. In fact, space, or rather NASA, is where RoboGlove (Fig. 2) came into being. Developed in conjunction with General Motors, it uses technology initially developed for the Robonaught 2 (R2) robotics project (see “These Robots Are No Danger, Will Robinson” on electronicdesign.com). In particular, R2 has an articulated hand with a complex feedback mechanism.

RoboGlove is essentially a wearable exoskeleton gripping tool. A person typically can grip or hold an object for a few seconds, but it becomes more difficult as the weight and time increase. Odd positions only exacerbate the problems. Repetitive stress syndrome (RSS) is often an issue, and RoboGlove can address it by reducing the amount of stress involved in an action or process.
The device would be very handy on the assembly line, especially where large or heavy items need to be held. Use cases include the ability to pick up an item and then lock the fingers so the user’s hand provides minimal force. RoboGlove can provide a peak force of 50 pounds and a continuous force of 15 to 20 pounds.
RoboGlove uses the same Tendon Driven Finger Actuation System technology employed by R2. Unlike the R2 hand, RoboGlove is just assisting so it uses a single tendon instead of the four or five tendons used by R2. The linear actuators are in the forearm along with the control electronics. An FPGA handles sensor feedback.
Project Daniel
Mike Ebeling, CEO and founder of Not Impossible Labs, gave an inspiring presentation at the 2014 Intel International Science and Engineering Fair talking about some of the projects the organization has worked on (see “Not Impossible Labs Inspires Intel ISEF Students” on electronicdesign.com). Not Impossible Labs fosters an open, collaborative approach to solving problems. Its two initial projects were Eyewriter and Project Daniel.
Eyewriter is a low-cost system that allows patients with a debilitating disease like amyotrophic lateral sclerosis (ALS, also known as Lou Gehrig’s Disease) to use their eyes to communicate with others. It was initially built around a pair of cheap sunglasses and a camera that tracks eye movement. The project was launched to provide Tempt One, a noted Los Angeles graffiti artist with ALS, a way to communicate again. The open-source technology is available for others as well.
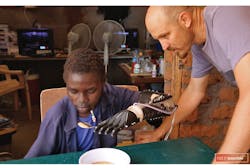
Project Daniel uses a similar approach. It started as a way to give Daniel a new set of arms (Fig. 3). Daniel lives in South Sudan in the war-torn Nuba Mountains. Unfortunately, there are many people like Daniel who have lost multiple limbs. Conventional prosthetics are expensive and generally unavailable to local doctors.

Not Impossible Labs used a Makerbot Replicator 2 3D printer to create custom prosthetics for people like Daniel. The results may be crude compared to commercial solutions but the cost is considerably lower, making it practical for third-world countries.
The initial prosthetic was based on the Robohand designed by Richard van As. It can be found on MakerBot’s Thingverse, which hosts a wide range of 3D projects. The prosthetics are much more advanced. It takes about $100 worth of plastic filament plus some medical orthoplastic and metal parts to make an arm.
Power, a laptop, and a 3D printer are the major items that are needed to make the prosthetics. Dr. Tom Catena helped train others to use the equipment so they could create new limbs for others. After the initial training, they created two more arms by the time the project team had returned home.
NASA Exoskeleton
NASA’s 57-pound X1 (Fig. 4) is a lower-extremity exoskeleton developed in conjunction with the Florida Institute for Human and Machine Cognition (IHMC). It provides mobility assistance for abled and disabled users.

The X1 is essentially a robot that detects the user’s movements and augments them. The suite features torque-controllable, powered actuators at the hip flexion/extension and knee flexion/extension. The hip joints are passive, allowing hip rotation.
The exoskeleton is adjustable so it can fit a variety of body sizes. The powered joints are co-located with the user’s joint. The anthropomorphic structure is created using an adjustable harness. The harness also goes up the back and around the shoulders. The power pack is on the back.
The X1 has 10 degrees of freedom (DOF). The four powered joints at the knees and hips are capable of variable impedance, ranging from zero impedance for transparent mode to high impedance for stiff position control.
The exoskeleton can be used for different purposes. In space, it could be used as an exercise device since an astronaut’s body needs exercise in low gravity or it deteriorates. Astronauts on long-term missions typically have an exercise regimen and, sometimes, special equipment. The X1 could provide similar resistance exercises as well as freedom of movement. A suit has built-in sensors so telemetry could provide a record of an astronaut’s activity. Think of it as a very advanced pedometer.
The X1 technology also could provide assistance in space, especially when used with a spacesuit. Pressurized spacesuits are an extra burden to astronauts, and an exoskeleton could reduce the effort to use them.
Use of the X1 on Earth is similar to its use in space. It can provide enhancement as well as restrictions, offering some interesting approaches to rehabilitation. For example, if one joint of the leg is being rehabilitated, then it might have augmentation while the other leg has added resistance to build up muscle.
The X1 is one of many exoskeleton projects. Honda has been using technology developed for the Asimo robot (see “Attack Of The Humanoid Robots” on electronicdesign.com) in its Bodyweight Support Exoskeleton. It is being tested as a worker-assistance device in areas such as assembly lines where users need to squat or place themselves in difficult positions to accomplish a ask. It can help reduce stress because of positioning or weight. A variation of Honda’s Walking Assist Device is being used in hospitals to assist in rehabilitation.
Exoskeletons are useful now and continue to improve. There are still challenges from improving sensing and feedback mechanisms as well as enhancing power supplies and incorporating regenerative power systems.
About the Author

William G. Wong
Senior Content Director - Electronic Design and Microwaves & RF
I am Editor of Electronic Design focusing on embedded, software, and systems. As Senior Content Director, I also manage Microwaves & RF and I work with a great team of editors to provide engineers, programmers, developers and technical managers with interesting and useful articles and videos on a regular basis. Check out our free newsletters to see the latest content.
You can send press releases for new products for possible coverage on the website. I am also interested in receiving contributed articles for publishing on our website. Use our template and send to me along with a signed release form.
Check out my blog, AltEmbedded on Electronic Design, as well as his latest articles on this site that are listed below.
You can visit my social media via these links:
- AltEmbedded on Electronic Design
- Bill Wong on Facebook
- @AltEmbedded on Twitter
- Bill Wong on LinkedIn
I earned a Bachelor of Electrical Engineering at the Georgia Institute of Technology and a Masters in Computer Science from Rutgers University. I still do a bit of programming using everything from C and C++ to Rust and Ada/SPARK. I do a bit of PHP programming for Drupal websites. I have posted a few Drupal modules.
I still get a hand on software and electronic hardware. Some of this can be found on our Kit Close-Up video series. You can also see me on many of our TechXchange Talk videos. I am interested in a range of projects from robotics to artificial intelligence.
Comment About the Article
To join the conversation, and become an exclusive member of Electronic Design, create an account today!

Leaders relevant to this article: