These Smart Walls Can’t Talk, But They Definitely Can See

We think of Interior walls for defining and dividing areas (and providing a place to hang things), but what if they could easily and cheaply be transformed into sensors? That’s what a joint project team from Carnegie Mellon Institute School of Computer Science and the Disney Research Pittsburgh has done, as detailed in a paper presented at the ACM CHI Conference on Human Factors in Computing Systems.
Their highly readable paper, “Wall++: Room-Scale Interactive and Context-Aware Sensing” provides full details on how they used conductive paint to add a dual-function role to a standard wall, providing a mutual-capacitance sensor for close-range sensing plus an electromagnetic-field sensor for wider-area performance. The result is what they call the Wall++, which can become part of a “smart” infrastructure to sense human touch, detect gestures, and even determine when appliances are in use.
Rather than opt for a surface of complex sensors, the team strived to meet three broad and difficult objectives:
- Low cost—they avoided expensive, conductive paint laced with silver, and instead used low-cost paint containing nickel.
- Easy to apply—no special skills are needed, using a standard paint roller and taped-off areas.
- invisible to the occupant—the conductive pattern is covered with a coat of regular latex paint to enhance surface durability and hide the electrodes.
In capacitive-sense mode, the wall operates somewhat like a touchpad, with its electric field reacting to any contact with a hand or body. In electromagnetic-field mode, the electrodes detect the distinctive electromagnetic (EM) signatures of electrical/electronic devices, allowing the system to identify and locate nearby devices. It can also track the location of a nearby person wearing a device that emits an EM signal.
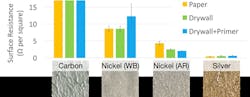
1. The conductivity test involved different paints across three backing materials. Shown is a close-up of painted surface. Silver paint was deleted due to its high cost, while carbon paint was eliminated due to its high resistance. (Source: Carnegie Mellon)
The paper details more than just their final approach. It also shows alternatives they investigated and discarded among choice of conductive paints, backing materials, application methods, number of coats, and topcoats. They also evaluated different electrode patterns for sensing range and resolution, using an LCR meter to measure electrical impedance at 100 kHz. Tests included carbon, water-based nickel, acrylic-based nickel, and silver paints (Fig. 1); application using brush, roller, and spray (Fig. 2); and standard wallpaper, drywall, and primed drywall as backings.
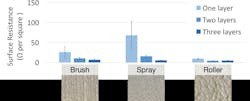
2. Conductivity tests with different application methods and number of coats showed that roller painting yielded the highest conductivity and lower variance across the surface, and proved to be the fastest application method. (Source: Carnegie Mellon)
Tests went beyond just the materials and their application, though. They also tested sensor patterns based on lines, stripes, half circles, diamonds, and circle dots. The diamond pattern proved best, and subsequently they checked different pattern sizes and pitch (Fig. 3) using model-based simulations and actual tests.
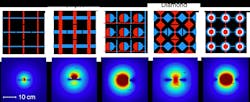
3. The electrode patterns were also studied, with transmitters in red and receivers in blue (top); electric-field simulations of electrodes in the black region (higher voltages in red) were also performed (bottom). (Source: Carnegie Mellon)
The final configuratin has 70-cm electrodes at a 48-cm pitch, painted on a 12 × 8 ft. (3.7 × 2.4 m) wall (Fig. 4) with 22 columns and 15 rows of electrodes. This required 37 coaxial-cable connections to custom-built sensing electronics, with two multiplexed front ends (one for capacitive sensing and the other for EM-field sensing).
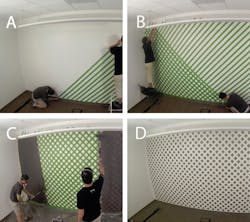
4. Painter’s tape was laid down in a crosshatched pattern (A & B), and then painted with a roller (C) to create a grid of regular diamonds (D). (Source: Carnegie Mellon)
Testing and evaluation began with sensing of “no-signal” conditions to establish a baseline and correct for inevitable inconsistencies of the paint layering. The data reduction divided the wall into a grid pattern; then they looked at the sensed outputs of each grid box relative to its neighbors.
For capacitance-mode testing, they evaluated sensing of walls being touched, as well as a hand hovering at a 10-cm standoff. They tested the ability to sense the body pose of users close to the wall (Fig. 5).

5. In the user study, six poses were used (top left) and their capacitive images were averaged (bottom left). The “confusion matrix” for six poses is key to decoding the data and deriving a conclusion. (Source: Carnegie Mellon)
For EM-field sensing of nearby appliances and their on/off state, the team rearranged the single-wall configuration into evenly distributed column antennas around the room periphery to support two-dimensional localization, and added algorithms to minimize the effects of inevitable EMI. They then used received signal strength (RSS) as the basis for analysis and triangulation of signals from each known appliance.
Tests also involved the wall’s ability to localize people wearing wristbands which transmitted a steady 1.5-MHz signal. As expected, distance errors decreased as the number of EM-tracking antennas increased (Fig. 6).
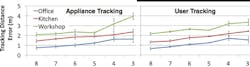
6. The tracking-distance error for appliances (left) and users (right) is a function of the different numbers of column antennas. Here, it’s shown with three locations tested. (Source: Carnegie Mellon)
Due to its low cost and ease of “installation,” the team foresees various possibilities for their Wall++ approach, such as placing wall light switches or other controls wherever is most convenient, or for gesture-based control of videogames. The monitoring could also be used to adjust light levels when a TV is turned on, or alert a user in another location when a laundry machine or electric kettle turns off.

About the Author

Bill Schweber
Contributing Editor
Bill Schweber is an electronics engineer who has written three textbooks on electronic communications systems, as well as hundreds of technical articles, opinion columns, and product features. In past roles, he worked as a technical website manager for multiple topic-specific sites for EE Times, as well as both the Executive Editor and Analog Editor at EDN.
At Analog Devices Inc., Bill was in marketing communications (public relations). As a result, he has been on both sides of the technical PR function, presenting company products, stories, and messages to the media and also as the recipient of these.
Prior to the MarCom role at Analog, Bill was associate editor of their respected technical journal and worked in their product marketing and applications engineering groups. Before those roles, he was at Instron Corp., doing hands-on analog- and power-circuit design and systems integration for materials-testing machine controls.
Bill has an MSEE (Univ. of Mass) and BSEE (Columbia Univ.), is a Registered Professional Engineer, and holds an Advanced Class amateur radio license. He has also planned, written, and presented online courses on a variety of engineering topics, including MOSFET basics, ADC selection, and driving LEDs.
Comment About the Article
To join the conversation, and become an exclusive member of Electronic Design, create an account today!

Leaders relevant to this article: