Tesla Patent Application Describes New GPS Positioning Technology

In a patent application filed in 2017 and made public last month (International publication number WO2018222274-“Technologies for Vehicle Positioning”), Tesla describes a technology that it believes will result in more accurate GPS positioning. The proposed invention would increase positioning accuracy via determining and applying offsets—corrections—in various ways and sharing this information between vehicles.
Tesla describes a system of matching camera data with vision maps to detect the exact location of a vehicle. In essence, the system involves using camera sensors on Tesla EVs to fine-tune the GPS data. It would detect and match locations using other vehicles in a fleet as “reference stations” to calculate a set of corrections for various error components. The fleets of vehicles would then share the necessary corrections so that pinpointing the vehicle is possible even with weak GPS signals.
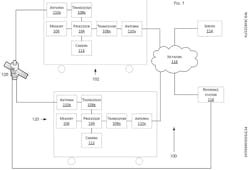
Shown is a schematic from Tesla’s “Technologies for Vehicle Positioning” patent application. The numbers refer to specific descriptions in the patent applications.
Problems with the current accuracy of GPS positioning cited by the Tesla application include satellite geometry, signal blockage, ionospheric perturbation, and atmospheric conditions, among others. All can affect the accuracy of a GPS receiver.
Tesla is developing fully self-driving vehicles, so geo-location accuracy is critical. As the patent application notes: “For example, a smartphone with a positioning receiver may be able to determine its position to within five meters of the smartphone. The accuracy of the position determination may worsen when the receiver is in proximity of buildings, bridges, trees, or other structures. Although this may be sufficient for some positioning applications, greater accuracy is desirable for other applications, including autonomous driving.”
The filing further notes: “The camera can detect geometry of a boundary of a lane, as known to skilled artisans, on which the vehicle … is traveling. This functionality has a beneficial utility because such detection can be used in a vision-map matching localization approach, as disclosed herein, where a location estimate is varied until the location estimate makes a camera-reported lane boundary coincide with map-reported lane boundaries. The images may be individual still photographs or sequences of images constituting videos. The camera can comprise an image sensor, such as a semiconductor charge-coupled device (CCD) or an active pixel sensor in a complementary metal-oxide-semiconductor (CMOS) or an N-type metal-oxide-semiconductor (NMOS), and a lens.”
The patent application describes software that allows vehicles to send signals and positioning data to each other. Consequently, the cars can function like Earth-based GPS satellites, feeding positioning information to other vehicles on the road.
A hint that Tesla may be planning to deploy this technology as part of its Autopilot feature is the fact that all of the inventors named on the application were—at one point or another—part of the Autopilot development team.

About the Author
Murray Slovick
Contributing Editor
Comment About the Article
To join the conversation, and become an exclusive member of Electronic Design, create an account today!

Leaders relevant to this article: