These Robots Are No Danger, Will Robinson

The word robot conjures up a range of visions, from the helpful R2-D2 and C-3PO of Star Wars to Arnold Schwarzenegger’s terrifying Terminator. These robots got up close and personal with people. While robots aren’t fully integrated into our society yet, as they are in Isaac Asimov’s I, Robot stories, they have had a long run on the assembly line.
Related Articles
- Looking For A Ride To The 2014 Consumer Electronics Show
- Robotics Moves To The Mainstream
- Moore’s Law Makes Household Robots Possible
- Real Robots
- Evaluating The Beam Telepresence System
Autonomous drones have plied the airways safely. But robots that work in close quarters with human beings and other delicate items require significantly more safety considerations. Designers can make them very small and simple, like iRobot’s Roomba line of robotic cleaners (see “Real Robots” at electronicdesign.com). Vacuum cleaners tend to be safe, and you’ll probably only get hurt if you trip over one.
This file type includes high resolution graphics and schematics when applicable.
Other companies are producing robots that mow lawns, which is a bit more dangerous. These autonomous mowers have safety shutoffs for their blades, but their larger size still could present some problems. Many other larger and more complicated robots are emerging in different applications, so designers need to account for safety as well as performance.
Teleoperated Robots
The definition of a robot is a lot like the definition of the Internet of Things—it’s fluid (see “The Internet Of Thingamajigs” at electronicdesign.com). Teleoperated devices normally are considered robots, and many are semi-autonomous. The main difference between these teleoperated and autonomous robots is that a user oversees the operation of the teleoperated robot.
I’ve used Suitable Technologies’ Beam (Fig. 1) to attend a number of conferences remotely (see “Evaluating The Beam Telepresence System” at electronicdesign.com). Telepresence robots are a manifestation of the numerous flying, rolling, and floating unmanned vehicles that currently exist.

Remote users directly control some teleoperated robots—for example, by driving them to a specific point. Other robots operate in a semiautonomous mode by using waypoints. Remote feedback often cannot operate quickly enough, so semiautonomous operation may be required for seamless operation. For example, most copters provide automatic stability control so the operator specifies direction or position, and the device responds accordingly. The typical default state is to hover in place.
Some devices can operate in autonomous mode. When many copters enter failsafe mode, some gently land, while others return to a predefined spot. Electric vehicles may enter this mode when their batteries begin to run low.
Research Robots
Today’s state of the art robots have required a lot of research, but much more needs to be done. That’s why robotics is such a hot subject for science competitions and universities. It encompasses a wide range of disciplines, from mechanical and electrical engineering to embedded programming and artificial intelligence.
Companies like ABB are looking to tackle many of the challenges robots are encountering in working with people. The ABB Dual Arm Concept Robot (DACR) research platform highlights some of these challenges and solutions. It consists of a portable torso and two arms (Fig. 2). It also uses single-phase power, and all of its surfaces are designed for easy cleaning.

ABB’s designers focused on allowing the arms to work in confined spaces by employing seven-axis kinematics for each arm. With this kinematic redundancy, the robot can move its elbows independently from the tool center point (TCP), while typical robotic arms could not. The controller then can employ more sophisticated avoidance algorithms in moving the arm.
The DACR has no exposed cabling, which sometimes is found on industrial robots, minimizing problems where cables could become entangled with nearby people or objects. The system is designed for light payloads, minimizing arm inertia when moving to soften any collisions with people or objects.
The system employs a software-based collision detection system. It also is designed so no human body part can be clamped between the axes of the system. Still, there are pinch points. But if a clamping force is detected, the software turns off the motors.
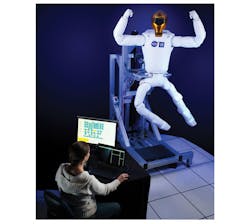
NASA’s Robonaut 2 has more of a challenge in the International Space Station (ISS) compared to its earthbound counterparts. The first Robonaut consisted of a torso and two arms, with the torso clamped in place. Robonaut 2 has legs that climb, enabling it to move in zero gravity and work with astronauts with both hands while keeping at least one leg anchored to the ISS (Fig. 3).
The system is designed for supervised control, although the arms and hands can be teleoperated. It is double-fault tolerant because of its critical environment. Everything has a double ground path, so nothing gets shocked. Some of these safety issues could be less important on the ground, but in space it is best to anticipate every problem to prevent failures that can turn into catastrophies.
Robonaut 2’s hands have five fingers, and its legs are 3 m long with seven joints. Its legs also have special end effectors that are designed to clamp onto the rails that are spaced inside and outside the ISS. Robonaut 2 uses these effectors to move from one rail to another without ever floating freely like the astronauts inside the station.
The brushless direct current (BLDC) motor control for each joint is an FPGA with PowerPC or ARM hard-core processors. The motor controls have additional sensors attached in addition to motor feedback. The joints also have a torsional spring so their stiffness can be controlled using the motors and the spring’s response.
The other challenge NASA faced was changing the usual velocity control found on ground-based robots to a momentum-based approach because the robot is designed to move around the ISS. The surfaces on the station are designed with a 125-pound kick limit so astronauts can push off any surface to move about the space station. Robonaut 2 tries to limit its pressure to 100 pounds. That can be tough for a 600-pound robot, including the battery pack. The legs were designed later, so NASA initially used this approach. The upper body is being reprogrammed to match these requirements.
Robots Now
The American National Standards Institute (ANSI) has approved the ANSI/RIA R15.06-2012 standard developed by the Robotic Industries Association. It matches the International ISO 10218:2011 standard. These standards provide a range of safety specifications for robots, including risk assessment and proper implementation of safeguarding robot systems. Developers working in this space can design their robots to address these standards. But what about those who do not want to start from scratch or have jobs for robots right now? There are alternatives.
Rethink Robotics’ Baxter has found a home on many production lines (Fig. 4). Like the DACR, it’s a field-ready two-armed torso. Its built-in software can be trained by example, allowing fast repurposing on an assembly line as demands change. It has been used in many production environments, like one plastic injection molding facility where it packed more than 800,000 medicine cups in its first six weeks of operation. Contract packages have found its ability to be reprogrammed invaluable. It is so simple that reprogramming could be done on a daily basis if necessary.

Baxter’s two arms may look large and heavy, but they are light. The motors inside drive a spring that provides flexibility if the arms come in contact with an obstacle like a person. On-board sensors including cameras help detect obstacles, including people. Cameras are located on the hands as well as the upper body. The display provides operator feedback.
Baxter already knows it has two arms and to keep them away from each other, since it doesn’t have to scratch any itches. They can perform independent tasks without colliding. If their individual tasks ever conflict, one will simply wait to make its next move while the other completes its operation.
The latest software update to Baxter included a number of new features. Baxter’s training initially would allow an object to be moved from a plane to another plane parallel to the first, such as picking up a block and putting it on top of another block nearby. Now it can take an object that might be on an angle and move it to another position on a different angle. Of course, moving from point A to B is just the simplest task Baxter can perform. Its cameras and sensors allow more dynamic recognition and actions based on characteristics and overall environmental status.
Baxter now can hook into a range of additional equipment, from programmable logic controller (PLC) devices to barcode scanners and cameras. It also can hold an object in a location for a predetermined amount of time. For example, it might pick up an object, pass it by a barcode scanner, then place it in a particular area based on the result of the scan, and finally initiate an action via a PLC device. Alternatively, it may hold an object in front of a paint sprayer.
People working with and around Baxter have been amenable to its operation. It helps to have an assistant that handles repetitive tasks and is safe to work around. Baxter also can be used out of the box, though a research version is available as well for those who want to program it directly. Baxter utilizes the Robot Operating System (ROS), but the research version makes all the source code that is delivered with the system available to developers. Researchers are utilizing the platform to experiment with their own software for new applications.
The Unbounded Robotics URB-1 is a one-armed robot that also runs ROS (Fig. 5). Unlike Baxter, URB-1 is mobile so it adds a suite of sensors to detect obstacles around itself, including a 2D laser scanner in its base. URB-1 is more of a development platform, but it could be a delivery vehicle with additional software. It already can be used with ROS-related software packages like Navigation and MoveIt for controlling its arm.

The back-drivable arm has seven degrees of freedom. Its weight limit is 3.3 pounds, so even when it’s fully loaded it shouldn’t hurt anyone it bumps into. The various sensors also can help to detect and avoid collisions. The torso can lift, allowing URB-1 to reach higher. Its modular, parallel jaw gripper has interchangeable fingertips.
Additional peripherals can be connected via USB 3.0, and extra mounting holes are spaced around the robot to allow external customization. URB-1 can run continuously for three to five hours and idle for up to 10. It also can be used as a more sophisticated telepresence robot. Its pivoting head has a 3D color sensor as well as microphones. Stereo speakers are mounted in the neck.
Rolling Robots
Robots with arms and mobility increase system complexity while providing additional functionality. Still, there are many applications where autonomy and mobility are sufficient, such as driverless cars. Many companies are working on these autonomous vehicles, though it’s a harder problem than getting from point A to point B. Today’s roads and highways are much more complex than factory floors, and their conditions are much more variable.
Safe solutions are challenging, but what if the constraints were different? That’s the approach Induct Technologies took in its Navia driverless shuttle (Fig. 6). This automated electric transport system is designed for flexible transportation of up to eight people around campus settings such as parks, airports, and industrial sites (see “Looking For A Ride To The 2014 Consumer Electronics Show” at electronicdesign.com).

The Navia is ringed with laser sensors that have a twofold purpose. One is to detect objects so they can be avoided. Running over potential passengers would be a bad idea. The other is to detect the vehicle’s position based on nearby buildings by using image recognition instead of GPS or special beacons. The maximum speed of the vehicle is 12.5 miles/hour.
The Navia has to do more than just get from point A to point B. It also needs to allow people to get on and off, often at predefined points. Cones or lines might mark a stop for passengers rather than the shuttle. The Navia also needs to open and close its gates so people stay within it while it is moving.
Induct Technologies has a system that manages multiple routes and vehicles for a more on-demand type of operation. A nearby empty unit could move to pick up passengers when they arrive at a location, possibly prompted by a smartphone text. Vehicles could cycle through a path with more added as demand increases. The system can even handle charging, replacing a vehicle with a fully charged unit.
Being electric, the Navia can operate indoors or outdoors, although its current open nature will limit operation for passenger comfort. It requires no special infrastructure other than plugging in a charging station or two. Induct Technologies was running the Navia at the 2014 International CES.
Aethon’s Tug, which is a smaller autonomous electric vehicle, is designed to operate indoors in locations like hospitals where the company has been very successful (Fig. 7). It delivers objects including drugs, food, and laundry instead of people (see “Robotics Moves To The Mainstream” at electronicdesign.com). Like Navia, it can operate 24/7.

The hospital environment is amenable to the Tug and its cargo because of the automation already built into many hospitals, such as doors and elevators that open electronically. It can pull a carrier to an elevator and then through a series of doors without user intervention. The Tug normally stops at a designated location where a person would then add or remove items.
The Tug is similar to the Navia with a sensor cluster including LIDAR, which helps it avoid people and objects. Usually it can navigate around objects, assuming a path is not completely blocked. Of course, it is not designed to remove an obstacle, but it can notify a person that it needs help. And like Baxter, the Tug can handle repetitive tasks so people can address more critical chores that robots cannot handle.
What’s Next
Robots will only continue to proliferate, but their forms may not always be the familiar rolling or humanoid versions of science fiction. Safe operation can be addressed in a variety of ways, including limiting the scope of the problem as well as the capabilities of the robot. Right now, it is impractical for a quadcopter to deliver a package anywhere around town. But it is practical to have a Tug deliver lunch.
About the Author

William G. Wong
Senior Content Director - Electronic Design and Microwaves & RF
I am Editor of Electronic Design focusing on embedded, software, and systems. As Senior Content Director, I also manage Microwaves & RF and I work with a great team of editors to provide engineers, programmers, developers and technical managers with interesting and useful articles and videos on a regular basis. Check out our free newsletters to see the latest content.
You can send press releases for new products for possible coverage on the website. I am also interested in receiving contributed articles for publishing on our website. Use our template and send to me along with a signed release form.
Check out my blog, AltEmbedded on Electronic Design, as well as his latest articles on this site that are listed below.
You can visit my social media via these links:
- AltEmbedded on Electronic Design
- Bill Wong on Facebook
- @AltEmbedded on Twitter
- Bill Wong on LinkedIn
I earned a Bachelor of Electrical Engineering at the Georgia Institute of Technology and a Masters in Computer Science from Rutgers University. I still do a bit of programming using everything from C and C++ to Rust and Ada/SPARK. I do a bit of PHP programming for Drupal websites. I have posted a few Drupal modules.
I still get a hand on software and electronic hardware. Some of this can be found on our Kit Close-Up video series. You can also see me on many of our TechXchange Talk videos. I am interested in a range of projects from robotics to artificial intelligence.
Comment About the Article
To join the conversation, and become an exclusive member of Electronic Design, create an account today!

Leaders relevant to this article: