Nanodrone Uses Moth’s Live Antenna for Smell-Based, GPS-Free Navigation

We have sensitive, effective, and broad-range sensors for real-world stimuli such as sound, light/images, and touch/pressure/force, but corresponding sensors for odors still elude us. There’s no electronic “nose” sensor that’s as effective or wide-spectrum as those found in nature, in animals ranging from insects to bloodhounds. Yet there are times when it would be advantageous to have an autonomous drone that could follow an odor trail to a disaster zone, explosive cache, environmental hazard, or the plume of a fire.
Addressing this issue, a team at the University of Washington has built and tested what they claim is the world’s first odor-sensing, self-guided bio-hybrid drone using the live antenna from a moth as transducer. Dubbed the “Smellicopter,” this palm-sized drone (Fig. 1) senses and avoids obstacles as it travels through the air searching and finding the odor source—and does all its navigation without GPS.

Why a moth antenna? In addition to sensing wind and vibrations, these fast-responding, highly sensitive transducers capture olfactory information that the insect uses to find food and mates. A sensed odor induces a complex series of chemical reactions, culminating in an “action potential” that propagates down the antenna to the brain of the insect. An electroantennogram (EAG) measures the aggregate electrical activity of the olfactory neurons in an antenna by measuring the voltage drop across the antenna.
“Nature really blows our human-made odor sensors out of the water,” said lead author Melanie Anderson, a UW doctoral student in mechanical engineering. “By using an actual moth antenna with Smellicopter, we’re able to get the best of both worlds: the sensitivity of a biological organism on a robotic platform where we can control its motion.”
That point was amplified by co-author Thomas Daniel, a UW professor of biology who co-supervises Anderson’s doctoral research. He added, “Cells in a moth antenna amplify chemical signals. The moths do it really efficiently—one scent molecule can trigger lots of cellular responses, and that’s the trick. This process is super-efficient, specific, and fast.”
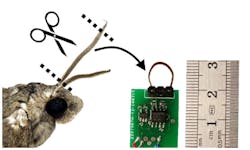
The researchers removed an antenna from a Manduca sexta moth and connected it to a custom-designed and built EAG amplifier circuit weighing just 1.5 grams, consuming only 2.7 mW, with a footprint of 3 cm2 (Fig. 2). (Researchers place moths in a refrigerator to anesthetize them before removing an antenna; after being separated from the live moth, the antenna stays biologically and chemically active for up to four hours.)

To make the connections between antenna and EAG, they insert a segment of 75-µm diameter stainless-steel wire into each end of the antenna (Fig. 3). “Bench” tests showed the stimulus-response timing relationship between a calibrated odor mix plus “puff” and the antenna output (Fig. 4).
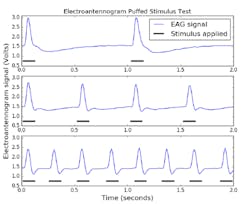
Antenna output was between 10 µV and 1 mV in response to stimuli, so they sent the gain to 1,000 after some experimentation. The resistance of the antenna arrangement was between 500 and 750 kΩ. This relativity high value resulted in excessive 60-Hz noise pickup by the circuit; there were also unavoidable issues of sensor baseline drift. To overcome these two issues, they included a 4th-order bandpass filter to reduce both noise and drift.
From Bench Test to Flight Test
The EAG sensor was connected to a commercially available nanodrone (Crazyflie 2) with a volume of 85 cm2 and weighing 23 grams. In addition to the EAG sensor and amplifier, they added a vendor-supplied optical-flow camera and infrared-laser rangefinder for velocity measurements so that the Crazyflie could hover without drifting despite lack of a GPS system. The unit also includes a Bluetooth radio transceiver. The nanodrone can fly for up to seven minutes with its 250-mAh battery.
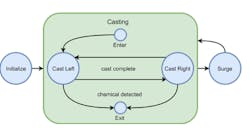
For an odor-guided drone, the navigation algorithm is critical. The team emulated the strategy used by moths and other insects, in which they often fly in a crosswind casting pattern and will steer into the wind if they encounter an odor of interest.
In their test flights with various induced breezes, the drone took off, hovered to orient itself into the wind, and began its “cast and surge” strategy (Fig. 5). When a volatile chemical was detected, Smellicopter would “surge” 25 cm upwind, and then resume casting. This brought the drone closer to the source with each surge while allowing it to regain “lock” even if there was a slight shift in the wind direction or movement of the source—both of which are real-world considerations.
Note that just as with moths, the algorithm requires that the Smellicopter be facing upwind most of the time. Doing so would normally require complex wind-flow measurements followed by intensive computations and subsequent motor control. Instead, they went with the simple, passive approach of adding two very lightweight vanes as “tails” similar to a weathervane to automatically orient the drone into the wind.
Results of the tests and tracking of the flight-path zigs and zags showed that Smellicopter found its target rapidly and came with a few centimeters of the source, while avoiding hard obstacles via four infrared sensors making 10 measurements per second.
UW assistant professor of mechanical engineering and co-advisor Sawyer Fuller remarked, “Finding plume sources is a perfect task for little robots like the Smellicopter.” He added that “Larger robots are capable of carrying an array of different sensors around and using them to build a map of their world. We can’t really do that at the small scale. But to find the source of a plume, all a robot really needs to do is avoid obstacles and stay in the plume while it moves upwind. It doesn’t need a sophisticated sensor suite for that—it just needs to be able to smell well. And that’s what the Smellicopter is really good at.”
The team has applied for a patent (Application Number US20200371530A1) for this unique drone. The full, fascinating project is described in a clear and well-written paper “A bio-hybrid odor-guided autonomous palm-sized air vehicle,” published in IOP Bioinspiration & Biomimetics; while that paper is behind a paywall, fortunately a full preprint is posted here. Further, given the nature of the project, it’s not surprising that there’s also a crisp, well-done video:
About the Author

Bill Schweber
Contributing Editor
Bill Schweber is an electronics engineer who has written three textbooks on electronic communications systems, as well as hundreds of technical articles, opinion columns, and product features. In past roles, he worked as a technical website manager for multiple topic-specific sites for EE Times, as well as both the Executive Editor and Analog Editor at EDN.
At Analog Devices Inc., Bill was in marketing communications (public relations). As a result, he has been on both sides of the technical PR function, presenting company products, stories, and messages to the media and also as the recipient of these.
Prior to the MarCom role at Analog, Bill was associate editor of their respected technical journal and worked in their product marketing and applications engineering groups. Before those roles, he was at Instron Corp., doing hands-on analog- and power-circuit design and systems integration for materials-testing machine controls.
Bill has an MSEE (Univ. of Mass) and BSEE (Columbia Univ.), is a Registered Professional Engineer, and holds an Advanced Class amateur radio license. He has also planned, written, and presented online courses on a variety of engineering topics, including MOSFET basics, ADC selection, and driving LEDs.
Comment About the Article
To join the conversation, and become an exclusive member of Electronic Design, create an account today!

Leaders relevant to this article: