Electronics Meets Textiles in an Array of Innovative Guises

>> Website Resources
.. >> Library: TechXchange
.. .. >> TechXchange: Power Management
.. .. .. >> Topic: Energy Harvesting
Researchers are exploiting the many ways that fabrics can support or exploit electronic circuits, as demonstrated by a range of projects. It’s a broad opportunity, obviously, because fabrics and clothes are so ubiquitous.
Triboelectric Harvesting
At Nanyang Technological University, Singapore, work is being done to use fabric as a washable, skin-touch-actuated textile-based triboelectric nanogenerator (TENG) for converting mechanical energy from body motions in useful electrical power, as a form of energy harvesting (Fig. 1). As detailed in their paper published in Nature, “Skin-touch-actuated textile-based triboelectric nanogenerator with black phosphorus for durable biomechanical energy harvesting,” various combinations of polymers and black phosphors are used to embed a harvester to create a TENG that overcomes the deficiencies of previous TENG approaches, in that an uncomfortable rubber-like material is not needed.
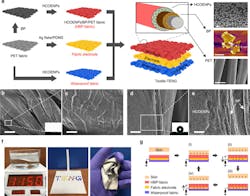
1. Shown are the fabrication process of textile triboelectric nanogenerator based on the polyethylene terephthalate (PET) fabrics, with the charge-induced component based on with successive coating the fabric with of black phosphorus (BP) and hydrophobic cellulose oleoyl ester nanoparticles (a and b); scanning electron microscope (SEM) images of the fabric from various perspectives (c, d, and e); photographs demonstrating that textile-TENG is washable and deformable (f); and a schematic of the working mechanism of textile-TENG (g). (Source: Nanyang Technological University)
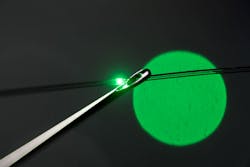
Further, their durable skin-touch-triggered textile-TENG can withstand user wear as well as washing. It extracts useful energy by harvesting both deliberate, voluntary motion as well as minute, involuntary body motion. Their prototypes developed output of about 250 to 880 V at about 0.48 to 1.1 µA/cm2, a result of touching by hand with a small force (~5 N) and low frequency (~4 Hz). It’s enough to power a small light-emitting diode and a digital watch (Fig. 2).

2. Illustrated are electrical outputs of textile-TENG under voluntary and involuntary friction: output voltages (a) and current densities (b) under 5 N touch with different frequency; output voltages (c) and current densities (d) of textile-TENG under 4-Hz touch with different forces; output voltages (e) and current densities (f) of textile-TENG mounted on different body regions; the possible involuntary friction of textile-TENG on different regions of human body (g); output voltages and transferred charge densities of textile-TENG in the case of involuntary friction with human body with continuous (red curve, i) or intermittent contact friction (blue curve, ii) (h and i). (Source: Nanyang Technological University)
Threads with LEDs
Meanwhile, a team comprised of researchers and manufacturers at MIT, the AFFOA (Advanced Functional Fabrics of America) Institute; Inman Mills (South Carolina), École Polytechnique Fédérale de Lausanne (EPFL, Lausanne, Switzerland), and MIT’s Lincoln Laboratory have produced fibers with embedded electronics that are so flexible they can be woven into soft fabrics and made into wearable, washable clothing (Fig. 3).
3. The fiber with embedded LEDs is so fine that it can be used to thread a needle. (Source: MIT)
They incorporated high-speed optoelectronic semiconductor devices, including light-emitting diodes (LEDs) and PIN-diode photodetectors, within fibers that were then mill-woven into soft, washable fabrics and made into communication systems. Their work is described in the journal Nature in their paper “Diode fibres for fabric-based optical communications,” which discusses the concept, production, execution, and results.
Fabrication begins with construction of a macroscopic preform that “hosts” discrete diodes (here LEDs and photodetector PIN diodes) internal to the structure, alongside hollow channels through which conducting copper or tungsten wires are fed (Fig. 4). As the preform is heated and drawn into a fiber, the conducting wires approach the diodes until they make electrical contact, resulting in hundreds of diodes connected in parallel inside a single fiber.

4. The glass is merged with the electro-optic semiconductor devices and connecting wires during the melt process as they’re coming off the preform. (Source: MIT)
Key to producing these new fibers was to add light-emitting semiconductor diodes the size of a grain of sand to the preform, along with a pair of copper wires a fraction of a hair’s width. The electro-optical devices are incorporated into the fiber material itself (Fig. 5), and the resulting fiber is inherently waterproof, which they demonstrated by using the LED/PIN diode pair as an underwater optical data link in a fish tank.
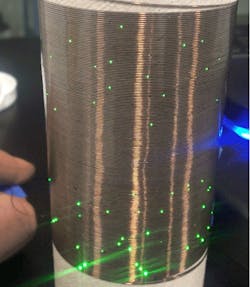
5. A spool of fine, soft fiber made using the new process shows the embedded LEDs turned on, to demonstrate their functionality. The team has used similar fibers to transmit music to detector fibers, which work even when underwater. (Source: MIT)
Capacitive Motion Sensing
Finally, fabrics can be used as the basis for the soft sensors needed for continuous monitoring of body movements. These highly stretchable textile‐silicone capacitive sensors find applications in human-articulation detection, soft robotics, and exoskeletons.
In a paper “Batch Fabrication of Customizable Silicone‐Textile Composite Capacitive Strain Sensors for Human Motion Tracking,” published in Advanced Materials Technologies, Harvard researchers demonstrated how they fabricated a fabric-based sensor using conductive knit fabric as electrode and silicone elastomer as dielectric. They established compliant, low‐profile, and robust electrical connections by fusing filaments of micro coaxial cable to conductive fabric electrodes of the sensor with thermoplastic film, and the capacitive sensors were integrated on a reconstructed glove for monitoring finger motions.
The layered batch-manufacturing process enabled rapid, robust, reliable, and scalable production of large sensor sheets, and used a laser-cutting process of the fabric mat to create arbitrary, customizable individual sensors (Fig. 6). The sensor itself is made of two electrode layers of highly stretchable, silver‐plated knitted textile (a standard, off-the-shelf material), which were separated by another standard silicone elastomer as the dielectric.
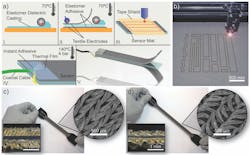
6. Shown in (a) is the fabrication process of the composite textile‐silicone sensor: Dielectric silicone casting (i). Bonding of fabric electrodes via silicone elastomer casting (ii). Placement of tape shield and laser cutting of sensor (iii). Creation of permanent electrical connection between coaxial cable and fabric electrode using instant adhesive and thermal film (iv). 3D illustration of the sensor and material layers (v). Other images are a diagram of arbitrary shaping of sensors via laser cutting (b); and photos of the sensor illustrating application of stretching at ≈0 and 100% strain (insets: cross‐section views; popouts: surface views) (c and d). (Source: Harvard University)
The strain‐dependent useful working range of the sensor was assessed by applying strains of 50, 75, 100, and 125% at a speed of 24 mm/s to the sensor (Fig. 7). The sensor showed a linear strain-capacitance relationship with limited hysteresis when cyclically stretched up to 100% applied strain. Beyond 100%, the plastic deformation of the textile affected linearity. Overall, the capacitive sensors showed high linearity and low hysteresis.
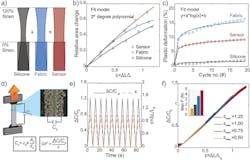
7. Representative sketch of area change for the sensor, the conductive fabric, and the silicone (a). Area change as a function of strain for sensor, conductive fabric, and silicone; a second‐degree polynomial fit is applied to the data (b). Plastic deformation percent for the sensor, conductive fabric, and silicone; a logarithmic fit is applied to the data (c). Diagram of electromechanical test setup and cross‐sectional image of the capacitive sensor (d). Relative change in sensor capacitance upon triangular cyclic straining to 100% at 0.11 Hz (e). Relative capacitance change of the sensor as a function of applied strain intervals; inset indicates max. force amount for the corresponding strain level (f). (Source: Harvard University)
The composite textile‐silicone sensors were integrated into a glove for hand motion tracking (Fig. 8), which required moderate strain levels (≈50%) as well as non-bulky sensors with minimal impedance due to the limited surface area available on a finger. The glove sensor tested the sensor capacity to capture finger kinematics on a glove in real time, and the capacitance change for each finger was plotted as a function of time for certain hand gestures, demonstrating the ability to track motion.
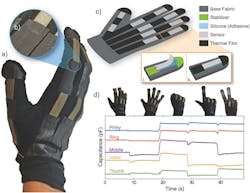
8. Photo of a sensing glove (a); cable routing and strain relief are provided by the overlaid thermal film (b); schematic diagram of the sensor placement and integration (c): attachment of the sensor using a silicone adhesive (i) and sensor with adhered thermal film (ii); capacitance output of the fingers during hand motion (d). (Source: Harvard University)
>> Website Resources
.. >> Library: TechXchange
.. .. >> TechXchange: Power Management
.. .. .. >> Topic: Energy Harvesting

About the Author

Bill Schweber
Contributing Editor
Bill Schweber is an electronics engineer who has written three textbooks on electronic communications systems, as well as hundreds of technical articles, opinion columns, and product features. In past roles, he worked as a technical website manager for multiple topic-specific sites for EE Times, as well as both the Executive Editor and Analog Editor at EDN.
At Analog Devices Inc., Bill was in marketing communications (public relations). As a result, he has been on both sides of the technical PR function, presenting company products, stories, and messages to the media and also as the recipient of these.
Prior to the MarCom role at Analog, Bill was associate editor of their respected technical journal and worked in their product marketing and applications engineering groups. Before those roles, he was at Instron Corp., doing hands-on analog- and power-circuit design and systems integration for materials-testing machine controls.
Bill has an MSEE (Univ. of Mass) and BSEE (Columbia Univ.), is a Registered Professional Engineer, and holds an Advanced Class amateur radio license. He has also planned, written, and presented online courses on a variety of engineering topics, including MOSFET basics, ADC selection, and driving LEDs.
Comment About the Article
To join the conversation, and become an exclusive member of Electronic Design, create an account today!

Leaders relevant to this article: