Game of Drones: Build a Robot for the HoverGames
A number of years ago, I was able to attend the Fire Fighting Robot competition held annually by Trinity College (Fig. 1). Initially, small robots were designed to douse a burning candle in a maze representing a fire within a house.

1. Trinity College holds the annual Fire Fighting Robot Competition each spring.
My daughter was a sophomore in high school and had been invited to present her paper on a robotic sensor she developed for a science fair competition. She eventually wound up becoming a mechanical engineering and is now a manager. She also had a robot ring bearer at her wedding. Compared to today, the robots in the firefighting competition back then were rather primitive because of the available hardware and software.
Flash-forward to today, and we have NXP’s HoverGames robotic competition. The first challenge is Fight Fire with Flyers. “The objective of this contest is to build a solution that enables your HoverGames drone to assist firefighters in their duties—in any way you can imagine, from wildfires to urban fires.” Production firefighting robots tend to be a bit larger than those used in student competitions (Fig. 2).

2. Shark Robotics’ Colossus has a 360-degree HD camera, thermal cameras, and NRBC sensors for detecting hazards.
This scenario is becoming more common. Drones were even tasked to assist firefighters in Paris when part of Notre Dame burned. More first responders are utilizing drones now, to the point where the FAA has provided licensing and guidance.
NXP isn’t having developers start from scratch. The company has made the KIT-HGDRONEK66 kit available (Fig. 3). This includes not only the mechanical portion of the drone, but also the RDDRONE-FMUK66 flight management unit (FMU). There’s also a heat sensor, an RDDRONE-IOT rapid IoT drone adapter board, and a PixyCam2 that has an NXP LCU microcontroller provided to the first 100 applications chosen for the competition. The PixyCam2 provides basic image recognition and tracking support. The kit has all that’s needed to compete in the HoverGames with the exception of your code.
3. The KIT-HGDRONEK66 is a quadcopter built around NXP’s RDDRONE-FMUK66 flight management unit (FMU).
The quadcopter hardware has sufficient expansion space to include additional devices like an NXP Freedom board or an i.MX 8M Mini to handle chores like vision processing. The i.MX 8M Mini can run operating systems like Linux, which supports the Robot Operating System (ROS). An RC receiver is in the mix, too, for remote-control support, but the bidirectional telemetry radio isn’t included in the standard kit.
The kit is for professional developers and some assembly is required. This isn’t designed to compete with the commercial and consumer drones on the market that typically lack the software access and support available from NXP. On the flip side, it provides complete software and debugging access.
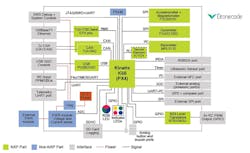
4. The RDDRONE-FMUK66 flight management unit (FMU) is based on a Kinetis K66. It can run the PX4 open-source flight-management software.
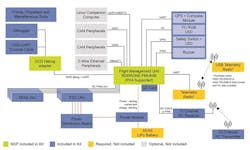
The FMU is suitable for many robotic projects, not just drones. It’s based on a Kinetis K66 (Fig. 4) and can run the PX4 open-source flight-management software. The FMU can hook into other peripherals using USB, CAN, serial interfaces, and two-wire 100Base-T1 Ethernet (Fig. 5). Ethernet support is similar to what’s being used in new automotive applications.

5. The RDDRONE-FMUK66 exposes all of the peripheral interfaces for easy connection to on-board peripherals.
An on-board A71CH secure element is the same chip used in Adesto Technologies’ SmartServer IoT gateway. This can support security with the cloud as well as to a local ground station. There’s also on-board FRAM and an SD card interface.
The PX4 project and ecosystem provides developer’s tools for drones. It was originally developed as a research platform for computer-vision-based flight control. The project is managed by the Linux Foundation’s DroneCode.org. This includes support for Pixhawk open autopilot hardware and the PX4 flight stack. DroneCode also hosts the QGroundControl ground-control system and the MAVLink communication protocol for drones. MAVLink is used in some commercial and consumer drones.
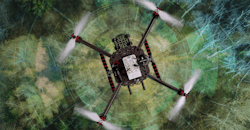
The assembled HoverGame carbon-fiber platform (Fig. 6) can build on PX4 software, enabling developers to concentrate on the problem instead of worrying about integration. The kit is available for $300.

6. The assembled kit looks like a typical quadcopter with the controls exposed.
The objective of the competition is a bit more nebulous than the Trinity College competition, which has more specific guidelines and goals. Applications for free hardware closes at the start of July, so you need to get moving quickly. Of course, you can always buy the kit and use it to develop applications independent of the competition.

About the Author

William G. Wong
Senior Content Director - Electronic Design and Microwaves & RF
I am Editor of Electronic Design focusing on embedded, software, and systems. As Senior Content Director, I also manage Microwaves & RF and I work with a great team of editors to provide engineers, programmers, developers and technical managers with interesting and useful articles and videos on a regular basis. Check out our free newsletters to see the latest content.
You can send press releases for new products for possible coverage on the website. I am also interested in receiving contributed articles for publishing on our website. Use our template and send to me along with a signed release form.
Check out my blog, AltEmbedded on Electronic Design, as well as his latest articles on this site that are listed below.
You can visit my social media via these links:
- AltEmbedded on Electronic Design
- Bill Wong on Facebook
- @AltEmbedded on Twitter
- Bill Wong on LinkedIn
I earned a Bachelor of Electrical Engineering at the Georgia Institute of Technology and a Masters in Computer Science from Rutgers University. I still do a bit of programming using everything from C and C++ to Rust and Ada/SPARK. I do a bit of PHP programming for Drupal websites. I have posted a few Drupal modules.
I still get a hand on software and electronic hardware. Some of this can be found on our Kit Close-Up video series. You can also see me on many of our TechXchange Talk videos. I am interested in a range of projects from robotics to artificial intelligence.
Comment About the Article
To join the conversation, and become an exclusive member of Electronic Design, create an account today!

Leaders relevant to this article: