Silicon Nanobot Swarms May Be Coming Sooner Than You Think
Swarms of nanorobots (usually referred to as nanobots) are the stuff of science-fiction movies (mostly scary, some not). However, they’re getting closer to reality as tiny, insect-like electromechanical “creatures” are being created and evaluated. But why not instead use extensions of silicon-based IC processes and leverage the many attributes and high areal density of this well-known, low-cost mass-production technique to create nanobots without discrete mechanical parts?
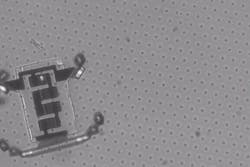
That’s what a team headed by Prof. Marc Miskin, assistant professor in the Department of Electrical and Systems Engineering at the University of Pennsylvania (he was at Cornell University until January 2019) has done, fabricating their nanobots directly on special silicon wafers. Taking advantage of IC-production techniques, they can create over one million functional units in a single production pass on a single 4-in. wafer (see figure).
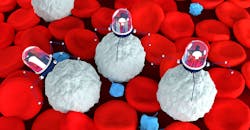
These silicon nanorobots move as their bilayer legs are actuated by a few hundred millivolts, which are generated from a laser shining on their integral solar cells. (Source: Marc Miskin, University of Pennsylvania)
These walking nanobots are both wireless powered and controlled (to a very limited extent, at this time) using embedded silicon photovoltaics. The robots “walk” using a new type of voltage-controllable electrochemical actuator fabricated from nanometer-thick membranes on a platinum base. Their bodies are rectangular skeletons of glass about 10 µm by 70 µm and topped with a layer of silicon. The legs, about 100 atoms thick, are built as two layers, comprising platinum applied via atomic layer deposition topped with titanium (or graphene). The researchers also etched electronic-control components and either two or four silicon solar cells into the body.
The solar power isn’t used in a conventional battery/motor arrangement, of course. Instead, by shining a laser on the nanobot solar cells, the resultant voltage (about 200 mV) causes the platinum in the leg to expand while the top layer does not. This bending becomes the motor that moves their limbs. By managing the stimulation, the legs alternately expand and contract, resulting in a basic walking-like gait. This 16-second video is especially illustrative; other basic short videos are here and here.
These actuators have extremely low power requirements, on the order of nanowatts, yet can carry loads several thousand times their own weight (the strength of basic materials and their expansion/contraction strain is quite high). “The legs are super strong," says Prof. Mishkin. "Each robot carries a body that's 1,000 times thicker and weighs roughly 8,000 times more than each leg."
Taking a New Fantastic Voyage
The researchers are looking to expand the utility of these nanobots to explore their environment, and they have even “survived” being injected through a hypodermic needle. To extend their operating zone to areas where light can’t reach, such as within the human body, the researchers are exploring providing power via ultrasound energy or magnetic fields.
Prof. Miskin added that many people ask him how his nanobots compare to the submarine in the classic 1966 sci-fi movie Fantastic Voyage (it’s over 50 years old!). "It's a fundamentally different kind of robot," he said. "You can throw them away." They are so cheap to make—a fraction of a penny each—that he thinks of them like chemicals or medicines.
Future research will involve developing wireless sensors so that the robots can transmit information on vital signs from a patient, such as levels of neuronal activity in the spinal cord, says Miskin. The nanobots are small enough that they can be injected with a syringe. They also plan to study the best way to retrieve them, perhaps with magnets.
The work was presented at the March 2019 meeting of the American Physical Society Boston, in a session entitled “Fabricating Autonomous Machines for the Cellular Scale.” Funding came from a variety of sources, including the Army Research Office, the Cornell Center for Materials Research, the National Science Foundation, the Air Force Office of Scientific Research, and the Kavli Institute at Cornell for Nanoscale Science.

About the Author

Bill Schweber
Contributing Editor
Bill Schweber is an electronics engineer who has written three textbooks on electronic communications systems, as well as hundreds of technical articles, opinion columns, and product features. In past roles, he worked as a technical website manager for multiple topic-specific sites for EE Times, as well as both the Executive Editor and Analog Editor at EDN.
At Analog Devices Inc., Bill was in marketing communications (public relations). As a result, he has been on both sides of the technical PR function, presenting company products, stories, and messages to the media and also as the recipient of these.
Prior to the MarCom role at Analog, Bill was associate editor of their respected technical journal and worked in their product marketing and applications engineering groups. Before those roles, he was at Instron Corp., doing hands-on analog- and power-circuit design and systems integration for materials-testing machine controls.
Bill has an MSEE (Univ. of Mass) and BSEE (Columbia Univ.), is a Registered Professional Engineer, and holds an Advanced Class amateur radio license. He has also planned, written, and presented online courses on a variety of engineering topics, including MOSFET basics, ADC selection, and driving LEDs.
Comment About the Article
To join the conversation, and become an exclusive member of Electronic Design, create an account today!

Leaders relevant to this article: