Medical “Vampire” Robot Seeks Human Vein, Inserts Needle, Sucks Blood

Inserting a needle into the vein in someone’s arm and drawing a blood sample, or inserting an intravenous line, is a common medical procedure and often an essential first step in patient care. The challenge of obtaining successful venous access ranges from easy to very difficult depending on the subject’s veins and physiology as well as the skill of the medical technician. Oftentimes, it ends in a frustrating unsuccessful outcome that requires retries, delays, and even additional help.
This clinical procedure is performed more than 1.4 billion times yearly in the United States. However, according to clinical studies, it fails in 27% of patients without visible veins, 40% of patients without palpable veins, and 60% of emaciated patients. Instrumentation with ultrasound imaging is available to assist clinicians in locating the vein, but manual needle insertion under ultrasound guidance requires careful hand-eye coordination for steady placement and control of both the probe and needle. Near-infrared (NIR) imaging systems are also used, but they have a penetration depth of only about 3 mm and tend to be ineffective with obese patients.
Venipuncture Device
Now, a team based at Rutgers University has developed and is field-testing a nearly autonomous robotic system that locates a likely suitable vein, inserts the needle, and even draws the blood sample. This venipuncture device is designed to safely perform blood draws on peripheral forearm veins. The system combines ultrasound imaging and miniaturized robotics to identify suitable vessels for cannulation and robotically guide an attached needle toward what’s called the lumen center.
A clinician does the setup of general positioning of the machine with respect to the subject’s arm, sterilizing/wiping the target zone, applying ultrasound hydrogel, and selecting the target vein’s center as displayed on a monitor. These coordinates are then used by the device to determine the necessary kinematics to ensure that the needle tip intersected the ultrasound imaging plane at the vessel center.
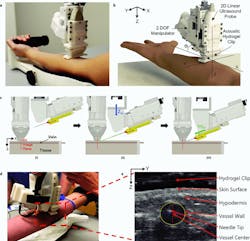
Once aligned and steady, the operator then initiates the insertion procedure, and the injection-axis carriage drives the attached needle tip forward at a 25-degree angle relative to the participant’s forearm to the target of the vein center, inserts the needle, and draws a 5-ml blood sample.
System Setup
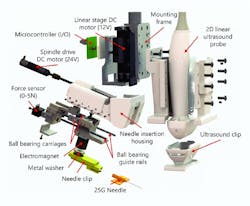
The system consists of two major mechanical assemblies: a two-dimensional ultrasound probe on a linear motion carriage and the single-dimension needle thrust, both linked by a microcontroller for coordinated control (Fig. 1).
Guidance and task execution employs a combination of force-vs.-displacement feedback profiling along with ultrasonic imaging (Fig. 2). Real-time analysis of that profile data indicates the likely success of the procedure, including the desirable sudden “breakthrough” that occurs as force suddenly drops over a short distance when the vein wall is pierced.
If the force/distance profile indicates the attempt will be unsuccessful (veins aren’t rigid, of course, and can move or roll during the process) or if no blood flows, the needle withdraws and the operator guides the machine to a new possible site. A graphical user interface shows the ultrasound image, force sensor, injection motor velocity, and position profiles for both Z-axis and injection motors (Fig. 3).

Efficacy
The results thus far on a limited number of test subjects are favorable and comparable to or better than those of clinical standards. The overall success rate was 87% on all 31 participants and 97% on the 25 participants who had easy-access veins, with an average procedure time of 93 ± 30 seconds.
The researchers note that future versions of this system device could be extended to other areas of vascular access, such as IV catheterization, central venous access, dialysis, and arterial line placement. Further, the system could be combined with an integral blood-assessment subsystem for an “all-in-one” blood-draw and test-result arrangement.
Details of the project are in the team’s paper “First-in-human evaluation of a hand-held automated venipuncture device for rapid venous blood draws” published in Technology (World Scientific). It focuses primarily on sensor data, profiles, algorithms, and results and with less discussion of the machine’s actual construction. While that paper is behind a paywall, it’s also available here as an HTML page with a link to a downloadable PDF file.
About the Author

Bill Schweber
Contributing Editor
Bill Schweber is an electronics engineer who has written three textbooks on electronic communications systems, as well as hundreds of technical articles, opinion columns, and product features. In past roles, he worked as a technical website manager for multiple topic-specific sites for EE Times, as well as both the Executive Editor and Analog Editor at EDN.
At Analog Devices Inc., Bill was in marketing communications (public relations). As a result, he has been on both sides of the technical PR function, presenting company products, stories, and messages to the media and also as the recipient of these.
Prior to the MarCom role at Analog, Bill was associate editor of their respected technical journal and worked in their product marketing and applications engineering groups. Before those roles, he was at Instron Corp., doing hands-on analog- and power-circuit design and systems integration for materials-testing machine controls.
Bill has an MSEE (Univ. of Mass) and BSEE (Columbia Univ.), is a Registered Professional Engineer, and holds an Advanced Class amateur radio license. He has also planned, written, and presented online courses on a variety of engineering topics, including MOSFET basics, ADC selection, and driving LEDs.
Comment About the Article
To join the conversation, and become an exclusive member of Electronic Design, create an account today!

Leaders relevant to this article: