Piezo Harvesting Powers Underwater Camera and Acoustic Backscatter Link

What you’ll learn:
- How a battery-free, untethered underwater camera gets its operating power via wave-energy harvesting.
- How the camera captures images with minimal power use.
- How the camera communicates captured image data back to the control station with net-zero power.
Powering autonomous, untethered vehicles is always a challenge, and doing so for underwater situations adds to this challenge. A multi-departmental team of MIT researchers has taken a tangible step to overcome this problem by developing a battery-free underwater camera, powered by energy harvesting, which also implements a wireless data link.
Their approach exploits that “other” wireless energy carrier, namely acoustic energy, by harvesting it via on-board piezoelectric transducers while using the same energy and transducers for the bidirectional data link (Fig. 1). They use ambient wave energy from natural water action, ship’s wakes, and other disturbances.
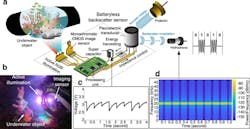
The device takes color photos even in dark underwater environments. The camera powers up from harvested acoustic energy, captures color images using ultra-low-power active illumination and a monochrome image sensor, and communicates wirelessly at net-zero power via acoustic backscatter.
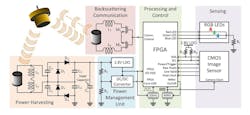
When the stored energy reaches a minimum required threshold, it autonomously activates a power-management unit to regulate the voltage and supply it to an on-board processing and memory unit (Fig. 2). The processing unit and oscillator trigger an ultra-low-power monochromatic CMOS camera and on-board active illumination to capture the image of an underwater object. The entire imaging process is powered by the harvested energy stored in the supercapacitor.
The project required advances in a technique for ultra-low-power underwater communication, as harvested power from the acoustic source typically ranges from a few tens to hundreds of microwatts. Meanwhile, state-of-the-art low-power underwater communication modems require 50 to 100 mW to communicate over tens of meters.
Piezoacoustic Backscatter
To overcome this gap, they leveraged piezoacoustic backscatter to communicate the captured image on the uplink, extending a recently developed net-zero power communication technology to enable telemetry of imaging data.
Underwater piezoacoustic backscatter communicates messages by modulating the reflection coefficient of its piezoelectric transducer. The battery-free node encodes pixels into communication packets by switching between different transducer loads (here, inductors). The camera either reflects a wave back to the receiver or changes its mirror into an absorber so that it doesn’t reflect back.
A remote hydrophone next to the transmitter measures the received acoustic signal to sense changes in the reflection patterns due to backscatter and if a signal is reflected back from the camera. If it receives a signal, that’s a “1” bit, and if there’s no signal, that’s a “0” bit. The switching is done by simply controlling two transistors and requires just 24 nW of power.
The reflection patterns are decoded and used to reconstruct the image captured by the remote battery-free cameras. Robust end-to-end communication is achieved by implementing a full networking and communication stack that incorporates underwater channel estimation, packetization, and error detection. Working range is about 40 meters, and they’re working to extend that distance.
The battery-free imaging system incorporates three monochrome LEDs: red, green, and blue. An always-on LED system would obviously consume far too much precious energy. Thus, the ultra-low-power processing and memory unit alternates between activating (flashing) each of these LEDs and capturing monochromatic images with each active illumination cycle (Fig. 3).
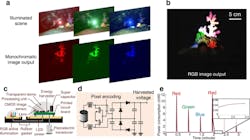
The monochromatic images are acoustically backscattered to the remote receiver. After decoding each of the images, the receiver synthesizes the received packets into multi-illumination pixels by applying them to the RGB channels of a digital pixel array to reconstruct color images.
Energy Harvesting
The active illumination using the LEDs is the most power-consuming aspect of the battery-free imaging system. For acoustic communication rates of 1 kb/s, empirical measurements demonstrate an average power consumption of around 276 μW for active imaging phase. In a demonstration of passive monochromatic imaging where active illumination isn’t used, the camera drops to about 112 μW. For either configuration, the entire energy budget is harvested from underwater acoustics.
Among the many tradeoffs they evaluated “on paper” was use of a single versus two transducers, with one for harvesting and one for backscatter communications. In principle, it’s possible to use a single transducer for both roles, since both transducers are identical. However, doing so would result in less harvested energy because less energy may be harvested in the open-circuit state than in the inductively matched state. Thus, they chose to use two transducers so that both processes can occur simultaneously without either of them reducing the other’s efficiency.
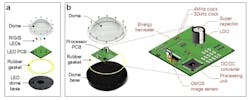
The entire device is packaged in a domed waterproof housing (Fig. 4). They also built a “base station” hydrophone transceiver that’s used to ping, interrogate, and receive data from the batteryless camera—a somewhat easier project.
In field tests, they captured color images of plastic bottles floating in a New Hampshire pond, and they took such high-quality photos of an African starfish that tiny tubercles along its arms were clearly visible (Fig. 5). The device also was effective at repeatedly imaging an underwater plant in a dark environment over the course of a week to monitor its growth.

As we’ve seen in other MIT research projects, the associated analysis and documentation are thorough and comprehensive, The basic nine-page paper “Battery-free wireless imaging of underwater environments” is published in in Nature Communications, plus there’s a posted 38-page Supplementary Information file that goes into further details covering all aspects of the concept, design, modeling, operating cycles, evaluation, power budgets, and analysis of each operating phase, unit fabrication, BOM, circuit description, costs, test arrangements, and evaluation.
Going beyond the written collateral page, there’s a brief video (1:30) showing the color image-capture scheme in action, as well as this one with more coverage of field trials:
About the Author

Bill Schweber
Contributing Editor
Bill Schweber is an electronics engineer who has written three textbooks on electronic communications systems, as well as hundreds of technical articles, opinion columns, and product features. In past roles, he worked as a technical website manager for multiple topic-specific sites for EE Times, as well as both the Executive Editor and Analog Editor at EDN.
At Analog Devices Inc., Bill was in marketing communications (public relations). As a result, he has been on both sides of the technical PR function, presenting company products, stories, and messages to the media and also as the recipient of these.
Prior to the MarCom role at Analog, Bill was associate editor of their respected technical journal and worked in their product marketing and applications engineering groups. Before those roles, he was at Instron Corp., doing hands-on analog- and power-circuit design and systems integration for materials-testing machine controls.
Bill has an MSEE (Univ. of Mass) and BSEE (Columbia Univ.), is a Registered Professional Engineer, and holds an Advanced Class amateur radio license. He has also planned, written, and presented online courses on a variety of engineering topics, including MOSFET basics, ADC selection, and driving LEDs.
Comment About the Article
To join the conversation, and become an exclusive member of Electronic Design, create an account today!

Leaders relevant to this article: