What’s the Difference Between TMR and GMR Sensors?

Download this article in PDF format.
Demand for magnetic sensors continues to grow across a wide range of applications – from automotive electronics to industrial equipment and consumer electronics. For instance, tunnel-magnetoresistance (TMR) sensors can be used in cars’ steering columns to improve the accuracy of automated parking capabilities. As such, these advances move the automotive industry closer to required instantaneous processing and actions for fully autonomous driving.
Due to these emerging applications, various electronics companies have developed TMR sensors that utilize a new type of magnetic sensor as their main working principle. This new sensor technology often leverages a wealth of technologies built up in the manufacturing of hard-disk-drive (HDD) magnetic heads, but with additional enhancements.
Mass production of TMR sensors has been ongoing since 2014. TMR technology sensors achieve a high output—about 20 times higher than conventional anisotropic magnetoresistance (AMR) sensors, and nearly six times higher than giant magnetoresistance (GMR) sensors, the latter of which contain at least two magnetic layers separated by a nonmagnetic layer. TMR sensors also offer advantages such as high accuracy, high stability with less temperature drift, and less aging deterioration. They also perform well as angle sensors, position sensors, and rotary sensors.
Significantly Higher Output
The TMR element, manufactured using advanced thin-film process technology, is a thin-film element in which the barrier layer of an insulator is sandwiched between two ferromagnetic substance layers (free layer and pin layer). The magnetic orientation of the pin layer is fixed, while the magnetic orientation of the free layer changes in accordance with the direction of the external magnetic field. The electrical resistance of the TMR element changes along with this change in the free layer.
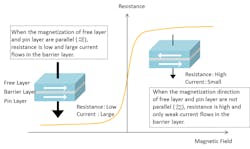
1. TMR exhibits higher resistance when there’s a small amount of current.
When the magnetic orientations of the pin layer and the free layer are parallel, the resistance is at a minimum and large current flows in the barrier layer. In the opposite scenario, when the magnetic orientations of the pin layer and the free layer are anti-parallel, the resistance becomes extremely high and almost no current flows in the barrier layer (Fig. 1).
The rate of change of the resistance in an element is indicated by a value called the MR (magnetoresistance) ratio. The MR ratio values of the AMR and GMR elements are 3% and 12%, respectively, whereas the MR ratio of the TMR sensor is 100% (Fig. 2). This higher MR ratio characteristic yields higher sensitivity and resolution over existing, competing technologies.
The makeup of GMR sensor technologies is a bit different. Generally, these sensors have been used to interpret and store data in HDDs, biosensors, and microelectromechanical systems (MEMS). GMR sensors are also used in automotive electrical equipment applications. The electron movement of the GMR element, in which a non-magnetic metal layer (such as a copper layer) is sandwiched between two ferromagnetic substance layers, is caused by the phenomenon of electrical conduction of the metals.

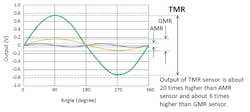
2. The table and plot compares the MR ratio values of the AMR element, GMR element, and TMR element.
In contrast, the electron movement of the TMR element is caused by the quantum-mechanical phenomenon of the tunnel effect. Thus, when the magnetic orientation of the pin layer and the free layer are anti-parallel, the GMR element has characteristics that prevent the electrons from moving easily. On the other hand, the TMR element has ideal resistive characteristics that practically prevent the electrons from moving through the barrier layer at all. Therefore, the MR ratio of the TMR element is extremely high, and the TMR output exhibits distinct characteristics such as either “Yes” or “No,” or either “1” or “0,” with no in-between states.
Consequently, the TMR element is currently used as a high-sensitive “read” element in HDDs. When the TMR element, with its high-sensitivity characteristic advantage, is used as a magnetic sensor, it provides an extremely high output—often up to six times higher than those for GMR components.
Less Temperature Drift and Aging Deterioration
When a magnet is rotated on a TMR sensor, the magnetic orientation of the free layer follows the direction of the magnetic field, and the resistance of the element fluctuates continuously. Since the TMR element’s resistance value is proportional to the relative angle of the magnetization directions of the pin layer and the free layer, the TMR sensor can be used as an angle sensor (Fig. 3).

3. This illustration reveals how a TMR element can be used as an angle sensor.
In another example, the TMR sensor can be used as an automobile-steering angle sensor and an electric-power-steering (EPS) motor angle sensor in place of conventional Hall element angle sensors. Because TMR sensors achieve higher outputs than Hall-effect elements, they also require lower power consumption than resolvers, making them an optimal choice for automotive electrical equipment sensor use.
Conclusion
There is a view that operating application software can compensate for a sensor element with slightly inferior characteristics. A sensor, however, is a kind of transducer that’s required to have high conversion efficiency. Predictions state that the sensing accuracy required in angle sensors for automotive electrical equipment applications is going to be two times higher than the accuracy currently required to achieve safer and more comfortable driving conditions.
TMR sensors are highly stable, epoch-making magnetic sensors that achieve high output, high accuracy, and less temperature drift and aging deterioration versus GMR sensors. Many engineers, including those at TDK, plan to expand their TMR sensor product groups, including position and rotary sensors, to meet a host of applications. Thanks to their high measurement sensitivity, combined with high output voltage and angle measurement accuracy, TMR sensors give developers significantly higher degrees of flexibility for their design work.

About the Author
Yoji Tsukakoshi
Yoji Tsukakoshi works in the Magnetic Sensors Business Group at TDK Corp.
Comment About the Article
To join the conversation, and become an exclusive member of Electronic Design, create an account today!

Leaders relevant to this article: