MEMS-Based IMUs Accelerate the “Internet of Moving Things”

Download this article in PDF format.
It’s understandable to think of the Internet of Things (IoT) as composed primarily of sensors that are fixed in place and continuously measure and report on temperature, motion, pressure, activity, and many other physical phenomena. The reality is that’s only a small part of a much bigger story.
Many IoT applications are mobile and implement on-the-go sensing, including imaging and specialized spectral sensing. Thus, precise knowledge of their orientation and location is needed for navigation, guidance, and data reporting. These include unmanned aerial vehicles (UAVs or drones), self-driving cars, autonomous submersible vehicles, industrial robots, surgical robots, trucks at mining sites, subterranean mine exploration and drilling, self-driving tractors, construction equipment, warehouse lifts and dollies…the resultant Internet of Moving Things (IoMT) comprises a very long list (Fig. 1).

1. Many IoT applications, such as aircraft control, military, and even farming, aren’t static but rather always on the move, leading to the Internet of Moving Things (IoMT) with requirements for high-accuracy position determination and navigation.
Sponsored Resources:
- ADIS16470/ADIS16475/ADIS16477 Mini Mems IMU ±2000°/sec
- MEMS IMUs for Demanding UAV Applications
- Analog Devices 1647X Mini Mems IMUs
Why not just use GPS with its worldwide coverage (or European Galileo or Russian GLONASS satellite-based systems)? The answer is simple: GPS and the others alone won’t suffice, for multiple reasons. First, GPS doesn’t work indoors, underwater, or in areas “shaded” by overpasses, heavy tree cover, and barriers. Keep in mind that the received GPS signal level at the Earth’s surface is a minuscule −160 dBm. Second, GPS signals can also be overwhelmed by local interference, whether inadvertent from nearby EMI/RFI sources or noise-generating power systems, or deliberate jamming and spoofing.
Fortunately, there’s an alternative technical solution that has none of the unavoidable weaknesses of GPS: An inertial measurement unit (IMU) that consists of a three-axis gyroscope to determine angular orientation, plus a three-axis accelerometer array to measure acceleration in each plane.
Unlike GPS, an IMU is just that—an inertial measurement system that requires no outside inputs or signals of any sort to assess acceleration and orientation. Its capabilities are based on fundamental principles of matter, mass, and physics, all of which are self-contained and immutable. In short, no external event can adversely affect an IMU (other than an intense electromagnetic pulse, of course).
Since IMUs are so capable and self-contained, what has slowed their rate of adoption, until recently? The answer is the usual collection of shortcomings of the pre-IC era—their size, weight, power and cost (often summarized as SWaP+C). The first IMUs were based on the rotating mass of a mechanical gyroscope, and were successfully used since the 1930s for aircraft navigation, intercontinental missile guidance, and space-mission control. In fact, the very best IMUs are still based on these gyroscopes.
However, these units are about the size of a basketball, weigh tens to hundreds of pounds, consume hundreds of watts, and costs tens of thousands of dollars—clearly not suitable for the needs of the IoMT. These mechanical IMUs were followed in the 1960s and 1970s by ring-laser and fiber-optic gyros, which used the relativistic Sagnac effect, had no moving parts, and were smaller, less expensive, and more reliable. Still, they weren’t suitable for mass-market applications.
Silicon MEMS Redefines The IMU
The introduction of MEMS-based IMU components has literally revolutionized the IMU. These devices use silicon that has been sculpted to provide both gyroscope and accelerometer functions, and leverage the advances, knowledge base, and production expertise of silicon IC technologies. Note that these MEMS gyros don’t use rotating masses, but instead employ vibrating structures to sense changes in orientation.
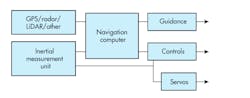
2. IMUs can be used as the sole position and orientation system. They’re used in close conjunction with other subsystems such as GPS, radar, and LiDAR for multiple perspectives on the situation.
With the advent of MEMS-based IMUs, everything—and it truly is “everything”—about the realm of possible applications for IMUs has changed dramatically. IMUs are often used with GPS for redundancy where appropriate (Fig. 2). However, many applications lack satellite access; therefore, the IMU is the sole source of navigation and guidance information.
The first MEMS-based IMU components were individual, single-axis gyroscopes and accelerometers. Single- and dual-axis units are still offered for applications that need only single or two-axis sensing. While they dramatically reduce the size, weight, cost, and power requirements compared to mechanical- and optical-based units, they still need external analog-to-digital converters (ADCs) plus calibration—and calibrating an IMU is a major task. Now, rapid advances in IMU integration, size, and performance are driving—and being driven by—the widespread use of IoMT applications such as UAVs.
The latest series of IMUs from Analog Devices demonstrates how fast and far MEMS-based IMUs have come with respect to size, weight, power, performance, and ease of use. The ADIS16470, ADIS16475, and ADIS16477 are IMU systems, each with a tri-axis gyroscope and a tri-axis accelerometer, and are especially well-suited for smart agriculture, unmanned autonomous vehicles, and navigation systems (Figs. 3 and 4).
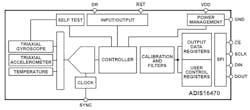
3. This block diagram of the ADIS16470, a wide-dynamic-range, miniature MEMS IMU, reveals only its basic functionality.

4. The ADIS16470 implements sophisticated calibration and filter algorithms on the basic gyroscope and accelerometer inputs, to provide an accurate and valid output.
Forget About Calibration
What about calibration, which historically has been one of the most difficult issues for an IMU? Most applications can’t afford the up-front cost or production time associated with the subtleties and issues related to testing and calibration of orientation and acceleration sensors. Such testing requires a specialized platform (commonly known as a Scorsby motion-test table) to measure and calibrate yaw-, pitch-, and roll-axis performance, along with a special setup for three-axis acceleration tests.
With these IMUs from Analog Devices, the need for any test or calibration by the user is eliminated. Instead, factory calibration characterizes each sensor for sensitivity, bias, alignment, and linear acceleration (gyroscope bias). As a result, each sensor has its own dynamic compensation formulas to provide accurate sensor measurements. In addition, precise orthogonal alignment along the three axes simplifies inertial-frame alignment in navigation systems.
The IMUs also have high rejection of shock and vibration, which could affect accuracy, unit-specific thermal modeling and calibration, excellent cross-axis insensitivity, and—especially helpful for the design-in effort—ease of use. An SPI interface, which simplifies connection of the IMU to the rest of the system, is used for both data reporting as well as IMU setup configuration and control
These attributes are necessary but might not be sufficient for applications where basic performance requirements must first be met. For these IMUs, users can choose rotational-measurement ranges of ±125°/sec, ±500°/sec, or ±2000°/sec, and accelerometer ranges of ±40 g or ±8 g. (depending on the specific model selected)
Size, weight, and power are also major concerns for mobile IMU applications, of course, but this concern is dramatically minimized here. ADI’s IMUs measure 11 × 15 × 11 mm and come in a 44-pin BGA package, weigh only 1.3 grams, and require just 50 mA from a single +3.0- to +3.6-V supply (Fig. 5). They’re also rugged, with shock survivability of 2000 g and an operating temperature range of −25 to +85°C or −40 to +105°C, depending on model option.

5. Small size doesn’t imply diminished performance: The ADIS16470 (shown here on an evaluation circuit board) measures 11 × 15 × 11 mm in its 44-pin BGA package.
Conclusion
The newest generation of MEMS-based IMUs redefines the entire non-GPS inertial guidance and navigation scenario. Applications that were only distant dreams of a few years ago are now very attainable, as proven by the countless small, lightweight drones in wide use today. There’s some irony here: The gyroscope-based IMU was largely pushed aside for many applications by optical gyros, and now we’ve come back to mechanical gyros, although realized by a very different technology.
There’s further irony in that acceleration and position have traditionally been among the most difficult of physical parameters to measure, especially in real time, but doing so now is almost a non-issue. Similarly, the greatest dilemma for users of mechanical and other IMU technologies, namely, ease of design-in, interface, and test and calibration, have been solved by advanced MEMS-based devices such as these IMUs. They’re fully calibrated and characterized, have easy-to use interfaces, and report their data in high-resolution digital formats.
Sponsored Resources:
- ADIS16470/ADIS16475/ADIS16477 Mini Mems IMU ±2000°/sec
- MEMS IMUs for Demanding UAV Applications
- Analog Devices 1647X Mini Mems IMUs
Related References:
About the Author

Bill Schweber
Contributing Editor
Bill Schweber is an electronics engineer who has written three textbooks on electronic communications systems, as well as hundreds of technical articles, opinion columns, and product features. In past roles, he worked as a technical website manager for multiple topic-specific sites for EE Times, as well as both the Executive Editor and Analog Editor at EDN.
At Analog Devices Inc., Bill was in marketing communications (public relations). As a result, he has been on both sides of the technical PR function, presenting company products, stories, and messages to the media and also as the recipient of these.
Prior to the MarCom role at Analog, Bill was associate editor of their respected technical journal and worked in their product marketing and applications engineering groups. Before those roles, he was at Instron Corp., doing hands-on analog- and power-circuit design and systems integration for materials-testing machine controls.
Bill has an MSEE (Univ. of Mass) and BSEE (Columbia Univ.), is a Registered Professional Engineer, and holds an Advanced Class amateur radio license. He has also planned, written, and presented online courses on a variety of engineering topics, including MOSFET basics, ADC selection, and driving LEDs.
Comment About the Article
To join the conversation, and become an exclusive member of Electronic Design, create an account today!

Leaders relevant to this article: