Battery Charging of Delivery Drones Copies Pigeons

One limitation on the use of drones to deliver packages is that they currently only store enough energy to fly within 10 miles of a fulfillment center. But researchers from MIT’s Computer Science and Artificial Intelligence Lab (CSAIL) say that they have a solution —thanks to pigeons.
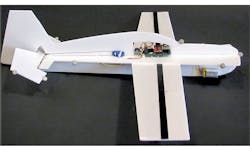
In a new paper, CSAIL researchers developed a lightweight unmanned aerial vehicle (UAV) that can perch on a power line like a bird (Fig. 1). This opens up the possibility for UAVs to recharge their batteries using the magnetic fields emitted by power lines.
The CSAIL team’s single-motor glider has a complex control system that automatically directs it to slow down, tip its wings, and hook onto a line, even in moderate wind conditions. Where past versions required wall-mounted cameras and a separate computer, CSAIL’s latest iteration has on-board sensors and electronics that can plan and execute moves in real-time.
PhD student Joe Moore, who wrote the paper with former PhD student Rick Cory and Russ Tedrake, an associate professor of electrical engineering and computer science, for the summer issue of Bioinspiration and Biomimetics, says that when his team was first thinking about how to improve UAV agility, they thought it’d be helpful to take cues from birds.
They spent hours researching pigeons and eagles’ abilities to stall — a complex phenomenon that involves flaring their wings, angling their bodies, maintaining high velocity, and accurately judging the trajectory needed to perch.
Birds consistently outperform man-made aircraft in post-stall flight regimes. Consider the task of a bird landing on a perch: as the animal approaches its target, it flares its wings and tail and orients its entire body to a very high angle of attack. In this post-stall flight, the bird increases the viscous drag by increasing the surface area of the wing exposed to the flow, but it also exploits the pressure drag caused by the separation of the airflow from the wing; these combine to produce large total drag forces and a rapid deceleration. Despite these large forces and rapid deceleration, birds are still seemingly able to achieve exceptional accuracy in order to position their bodies relative to the perch.
In the authors’ original paper they asked whether an extremely simple fixed-wing glider (no propeller) with only a single actuator in the tail can land precisely on a perch from a large range of initial conditions. To answer this question, they focused on the design of the flight control system; building upon previous work which used linear feedback control design based on quadratic regulators (LQR). They developed a nonlinear feedback control based on nonlinear model-predictive control (NMPC) and “LQR-Trees”. Through simulation using a flat-plate model of the glider, they found that both nonlinear methods are capable of achieving an accurate bird-like perching maneuver from a large range of initial conditions; the “LQR-Trees” algorithm is particularly useful due to its low computational burden at runtime and its inherent performance guarantees. With this in mind, they then implemented the “LQR-Trees” algorithm on real hardware and demonstrated a 95 percent perching success rate over 147 flights for a wide range of initial speeds. These results suggest that, at least in the absence of significant disturbances like wind gusts, complex wing morphology and sensing are not strictly required to achieve accurate and robust perching even in the post-stall flow regime.
Creating a computer model to execute a stall maneuver has typically been computationally difficult. As described in a 2010 MIT News article, the angles needed to pull it off result in airflow over the wings that is difficult to predict, which is why engineers have designed conventional planes to land the way they do — the long descent, the gradual braking, and the mile-long runway.
"It’s challenging to design a control system that can slow down a fixed-wing aircraft enough to land on a perch," Moore says. "Our strategy accomplishes this and can do so in outdoor environments using only on-board sensors."
Also, if you are interested in how the sensor system works, it was covered in a conference paper published a few years ago (the journal version of this paper is currently in the works):
Moore, Joseph, and Russ Tedrake. "Magnetic localization for perching UAVs on powerlines." Intelligent Robots and Systems (IROS), 2011 IEEE/RSJ International Conference on. IEEE, 2011.
About the Author

Sam Davis Blog
Editor-In-Chief - Power Electronics
Sam Davis was the editor-in-chief of Power Electronics Technology magazine and website that is now part of Electronic Design. He has 18 years experience in electronic engineering design and management, six years in public relations and 25 years as a trade press editor. He holds a BSEE from Case-Western Reserve University, and did graduate work at the same school and UCLA. Sam was the editor for PCIM, the predecessor to Power Electronics Technology, from 1984 to 2004. His engineering experience includes circuit and system design for Litton Systems, Bunker-Ramo, Rocketdyne, and Clevite Corporation.. Design tasks included analog circuits, display systems, power supplies, underwater ordnance systems, and test systems. He also served as a program manager for a Litton Systems Navy program.
Sam is the author of Computer Data Displays, a book published by Prentice-Hall in the U.S. and Japan in 1969. He is also a recipient of the Jesse Neal Award for trade press editorial excellence, and has one patent for naval ship construction that simplifies electronic system integration.
Comment About the Article
To join the conversation, and become an exclusive member of Electronic Design, create an account today!

Leaders relevant to this article: