Checking Out the NXP Hovergames NavQ Plus
The Hovergames 3 added a number of new items to the mix including the four-wheeled Buggy and the NavQ Plus (Fig. 1). I took a look at the latter (see the video above). The NavQ Plus is a system-on-module (SOM) that's built around a NXP’s i.MX 8M Plus system-on-chip (SoC). It can handle machine-learning (ML) chores and up to six cameras.

The system is designed to work in conjunction with a flight management unit (FMU) like the Kinetis K66-based RDDRONE-FMUK66 that's bundled with the Hovergames drone and buggy. The FMU manages the motors and typically runs an open-source autopilot like PX4. The NavQ Plus is designed to handle navigation and other chores like obstacle recognition and avoidance.
The NavQ Plus is built around the i.MX 8M Plus SoC (Fig. 2). The module with the SoC includes LPDDR4 DRAM and eMMC flash memory. The SoC has four Arm Cortex-A53 cores and a separate Arm Cortex-M7. The neural processing unit (NPU) can deliver 2.3 TOPS and works with artificial-intelligence (AI) models like image recognition from multiple video streams.
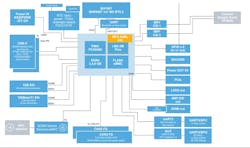
There are dual image signal processors (ISPs) to handle chores. The system also includes a 1080p60 H.265/H.264 encoder. The board supports up to six cameras (Fig. 3).

The system includes a range of interfaces including 100Base-T1 Ethernet, also known as 2-wire Ethernet or single-pair Ethernet (SPE) designed for low-cost system controls. There are two CAN interfaces as well. These are often used in robots to control and communicate with subsystems.
Overall, the platform provides an impressive interface and processing platform capable of handling real-time data and analyzing it using ML models.
About the Author

William G. Wong
Senior Content Director - Electronic Design and Microwaves & RF
I am Editor of Electronic Design focusing on embedded, software, and systems. As Senior Content Director, I also manage Microwaves & RF and I work with a great team of editors to provide engineers, programmers, developers and technical managers with interesting and useful articles and videos on a regular basis. Check out our free newsletters to see the latest content.
You can send press releases for new products for possible coverage on the website. I am also interested in receiving contributed articles for publishing on our website. Use our template and send to me along with a signed release form.
Check out my blog, AltEmbedded on Electronic Design, as well as his latest articles on this site that are listed below.
You can visit my social media via these links:
- AltEmbedded on Electronic Design
- Bill Wong on Facebook
- @AltEmbedded on Twitter
- Bill Wong on LinkedIn
I earned a Bachelor of Electrical Engineering at the Georgia Institute of Technology and a Masters in Computer Science from Rutgers University. I still do a bit of programming using everything from C and C++ to Rust and Ada/SPARK. I do a bit of PHP programming for Drupal websites. I have posted a few Drupal modules.
I still get a hand on software and electronic hardware. Some of this can be found on our Kit Close-Up video series. You can also see me on many of our TechXchange Talk videos. I am interested in a range of projects from robotics to artificial intelligence.