Quadrotors Come In All Shapes And Sizes

The recent AUVSI show was the place to find flying, rolling, walking and floating drones and robots of all shapes and sizes. Right now I want to concentrate on the quadrotors that we saw at the show as well as other recent shows where quadrotors have been on display. You can check out all our AUVSI 2014 videos on Engineering TV and more images in Machine Design’s AUVSI gallery.
Quadrotors have four propellers that allow them to deliver a very stable flying platform. They also come in all shapes and sizes from microdrones that will fit in the palm of your hand to larger systems that have longer flying times. Most of the smaller quadrotors are electric and have a flight time from 10 to 20 minutes. Larger ones tend to have gas engines with a longer flight duration.
Here are some of the quadrotors we have seen in our travels:
- Spiri And Kickstarter
- AR Drone 2.0 Four-Blade Platform from Parrot
- Parrot Bebop Drone and Oculus Rift Combine for a Virtual Bird's-Eye View
- Unmanned Flying and Rolling Orb (UFRO)
- InvertiX 400 Quadrotor Can Flip Over and Fly Upside Down
- Allied Drones Debuts Twin Rotor HL12 "Iris" UAV
Spiri And Kickstarter
I saw Spiri at this year’s Freescale Technology Forum. It was a successful Kickstarter project (see “Kickstarter Changes How Consumer Electronics Ideas Turn Into Gold”). One thing that makes Spiri stand out is that it is an autonomous drone that is also an open development platform.

Figure 1. Spiri was a successful Kickstarter project. The quadrotor has a Freescale i.MX6 plus and STM32 microprocessor.
The Spiri has a 1 GHz Freescale i.MX6 Dual Lite with dual ARM Cortex-A9 cores (see “Cortex-A9 Incorporates Electronic Paper Display Controller”) to handle the HD camera, a time-of-flight camera and communication while an STmicroelectronics STM32 handles navigation using the various sensors. It also handles the low resolution downward facing camera. It has a 1300 mAh lithium power battery.
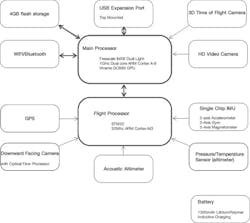
Figure 2. Spiri has a dual processor chip architecture that includes a 1 GHz Freescale i.MX6 Dual Lite and an STmicroelectronics STM32.
The time-of-flight camera is a bit unique and meshes well with the open development environment since this is an area that has yet to be exploited. It actually runs Ubuntu Linux on the i.MX6.
AR Drone 2.0 Four-Blade Platform from Parrot
We first got a look at Parrot’s AR Drone 2.0 at CES 2012. I talked with Michael Pastor of Parrot about the AR Drone 2.0.
The AR Drone 2.0 is designed to be a remote control drone that can be flown using a smartphone or tablet. The app uses the mobile device’s touch and tilt sensors to control the drone.
The AR Drone 2.0 is semiautonomous. It can hover providing a stable platform. It can even flip upside down and continue flying.
Parrot Bebop Drone and Oculus Rift Combine for a Virtual Bird's-Eye View
Parrot Bebop is Parrot’s newest drone, the Bebop. It boasts a stabilized HD video system that uses digital optic stabilization. It can be combined with the Oculus Rift virtual reality headset and the Parrot Skycontroller to give you a real (well, virtual) bird's-eye view. The standard version has a 300 m range and an extended version is on the drawing board with a 2 km range.
Unmanned Flying and Rolling Orb (UFRO)
Ok. Not your conventional quadrotor but definitely interesting. It can fly or roll. The Unmanned Flying and Rolling Orb (UFRO) is an experimental platform for search and rescue applications. It was developed at Oklahoma State University’s Unmanned Aircraft Systems.
Allied Drones Debuts Twin Rotor HL12 "Iris" UAV
Ok, I lied. Allied Drones was showing off a twin rotor system, not a quadrotor, but it has a gas engine as well as a battery driven version. The gas version has significantly longer flight time. The twin rotor design is supposed to be 30% more efficient than a single rotor, helicopter-style UAV.
About the Author

William G. Wong
Senior Content Director - Electronic Design and Microwaves & RF
I am Editor of Electronic Design focusing on embedded, software, and systems. As Senior Content Director, I also manage Microwaves & RF and I work with a great team of editors to provide engineers, programmers, developers and technical managers with interesting and useful articles and videos on a regular basis. Check out our free newsletters to see the latest content.
You can send press releases for new products for possible coverage on the website. I am also interested in receiving contributed articles for publishing on our website. Use our template and send to me along with a signed release form.
Check out my blog, AltEmbedded on Electronic Design, as well as his latest articles on this site that are listed below.
You can visit my social media via these links:
- AltEmbedded on Electronic Design
- Bill Wong on Facebook
- @AltEmbedded on Twitter
- Bill Wong on LinkedIn
I earned a Bachelor of Electrical Engineering at the Georgia Institute of Technology and a Masters in Computer Science from Rutgers University. I still do a bit of programming using everything from C and C++ to Rust and Ada/SPARK. I do a bit of PHP programming for Drupal websites. I have posted a few Drupal modules.
I still get a hand on software and electronic hardware. Some of this can be found on our Kit Close-Up video series. You can also see me on many of our TechXchange Talk videos. I am interested in a range of projects from robotics to artificial intelligence.
Comment About the Article
To join the conversation, and become an exclusive member of Electronic Design, create an account today!

Leaders relevant to this article: