How to build a low-loss stepper motor
Stepper motors are well known for their ability to perform accurate positioning in an open-loop mode. But they have a reputation for generating a lot of heat when rotating at high speeds. Generation of heat, of course, implies that the motor is operating at a low efficiency. Manufacturers have increasingly realized that efficiency can be an issue even for positioning motors. So they have adopted construction techniques aimed at boosting the efficiency of steppers, especially when rotating at high speeds.
To understand how to construct a step motor that is energy efficient, it is useful to review the losses that arise when a step motor rotates. Within the motor itself, most losses are copper and iron losses. Copper losses arise from current flowing in the stator windings. Iron losses are generated by the flux change in the rotor and stator core. The flux in the core changes as the rotor turns and as current levels change within the stator windings. Thus iron losses can be classified as those from the electromagnetic field and those from the stator winding.
Iron losses can be further subdivided into eddy current losses and hysteresis losses from magnetic field reversals. Other losses include mechanical loss and stray load loss. But these are small enough to be ignored compared with iron and copper losses.
To understand field iron losses, consider that a common hybrid-type stepping motor has a rotor containing a permanent magnet and teeth on its outer diameter that function as inductors. There are also teeth on the inner diameter of the stator core. Iron losses arise when the rotor rotates and the teeth periodically face each other, changing the flux in the stator core.
Iron loss is given by the expression
W0 = (2π/60)• N • T
1
where W0 = field iron loss, W; N = rotational speed, rpm; T = torque, Nm. Then eddy current loss We and hysteresis loss Wh per unit mass are respectively
We = ce • Bm2 • t2 • k2 • N2
2
Wh = ch • Bm1.6 • k • N
3
where ce and ch = iron loss constants determined by the material used; t = the thickness of the lamination sheets, mm; k = constant determined by the number of pole pairs; Bm = flux density, T; and N = rotating speed, rpm.
From these expressions it becomes clear that eddy current loss is proportional to the square of the rotational speed, and the hysteresis loss is proportional to the rotating speed. The iron loss is the sum of the eddy current loss and the hysteresis loss and it is proportional to somewhat less than the second power of rotational speed.
It should also be noted that there is a loss associated with the motor driver electronics. Driver electronics are designed so that a constant current is provided to the motor regardless of motor load. Thus loss is greatest when the motor has no load, because the power to the motor does no work. Nevertheless, motor losses are relatively large compared with driver losses.
Continue to next page
Copper and iron losses, Wc and Wfe respectively, can be expressed as
Wc = n • I2 • R
4
Wfe = Wm - Wc
5
where Wm = motor loss, W; n = the number of phases; I = the rms value of motor current, A; and R = motor winding resistance, Ω. Although stepping motor current is kept constant below about 1,000 rpm, it drops as speed rises above this area. This happens because motor impedance rises at higher speeds and begins to limit current. The region of operation where current drops is called the constant-voltage area.
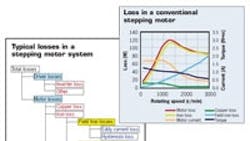
Usually the iron loss exceeds the field loss because the stator winding iron loss sums with the field loss when the motor rotates. Therefore, the difference between the iron loss and the field iron loss is a stator winding iron loss. The stator winding iron loss diminishes in the constant-voltage area because the current drops. Conventional step motors generally have a field loss that equals the iron loss at about 3,000 rpm.
Copper losses are generally small. Therefore, though total motor loss is equal to the sum of copper and iron losses, iron losses dominate at high speeds. They can account for over 90% of total motor loss in normal operation, so designers concentrate on reducing iron losses to boost motor efficiency.
From equations 2 and 3, it is clear that a strategy for reducing iron losses might include using material with a small iron loss constant (ce and ch) and employing thinner laminations. Use of thinner laminations having low-loss constants is a way to address both points. Tests show, however, that saturation flux density also tends to drop as iron losses diminish. Torque drops as well, so motor makers must adjust motor current to compensate, which tends to incur a larger copper loss.
In general, saturation flux density tends to drop as iron losses diminish. This property tends to reduce motor torque, so there must be a corresponding rise in motor current to keep torque levels up. Accordingly, copper losses rise with the necessary rise in current. All in all, motor manufacturers select laminations based on both iron losses and the torque required of the motor.
The fastening method employed for constructing laminations also can impact motor efficiency. The typical way of fastening laminations is through interference fits at various points on the laminations. The interference fits involve making dimples in each lamination layer at the point of interference fit. The problem is that electrical insulation between laminations breaks down at the dimples. Eddy currents then flow because of the dielectric breakdown.
By changing the dimple fastening method on the rotor and stator lamination stacks, the stator winding iron loss has been reduced by about 30%. Field iron losses also dropped slightly.
Taken together, methods used to address the various iron losses in stepping motors have been shown to reduce total motor loss by about 73% at the rotational speed where total loss peaks, compared with that of a similar conventional stepping motor. In the same vein, driver losses are 26% less when compared with the conventional case.
Continue to next page
Of course, losses have an impact on the amount of heat a motor generates. In one test conducted at the speed corresponding to maximum loss, the temperature of a conventional stepping motor rose to over 60°C in about five minutes, an operating point at which the motor coils burn out eventually. In contrast, the temperature of a similar low-loss stepping motor only approached 60°C after 100 minutes of continuous operation at this high speed.
Stepping motors are positioning actuators, so it is interesting to express loss as a function of rotating speed and load torque. The speed pattern of a traditional positioning operation looks like a trapezoid. The motor accelerates to a speed Nm in time t1, operates at a constant speed over time t2, then decelerates to a stop over time t3. Next, the motor generally rests while some operation (inspection, assembly, and so forth) takes place. The cycle time tc refers to the interval from motor start to the point at which the positioning sequence repeats.
Similarly, there is a torque pattern that corresponds to the trapezoidal speed curve. Torque TL is the load torque necessary during the period of constant speed. Acceleration torque Tz and deceleration torque Td are needed during acceleration and deceleration respectively. Because the stepping motor losses depend on rotational speed, the loss pattern follows the same trapezoidal shape as the speed curve.
When the instantaneous maximum value of the loss is w(t), the average value fo, the loss per cycle is calculated from
Wa = 1/tc • ∫tcow(t)dt
This expression can provide the loss experienced over an interval when amount of rotation, accel/decel time, rotational speed, and positioning time are either known or established from test data. Tests have shown that when the stepping motor only moves in small increments, there is not much difference between the loss experienced by a conventional motor and that of a low-loss motor. But the difference in losses rises with the amount of rotation.
Comment About the Article
To join the conversation, and become an exclusive member of Electronic Design, create an account today!

Leaders relevant to this article: