How to Run a Split-Phase Induction Motor with a Three-Phase Inverter
There are several reasons to use a three-phase inverter to run a single-phase induction motor, including isolation from variable power grids, reduction of peak currents and elimination of the starting capacitor. We will describe the implementation of an open loop, V/Hz control algorithm to run an arbitrary split-phase induction motor. The algorithm is implemented using International Rectifier's IRMCF341 motor control IC.
Inverterization of motor drives is increasing due to government regulation and energy efficiency concerns. In the case of motor drives, these factors also push designs toward variable speed AC motors, and permanent magnet motors in particular. In some cases, however, design requirements dictate that a split-phase induction motor is retained, but driven by an inverter. Besides possible energy savings, the inverter may be required in order to eliminate the starting capacitor, reduce peak currents, or provide isolation from variable power grids.
Single-phase motors are ubiquitous, cheap and reliable. These motors generally have a start winding and run winding which are 90° offset from each other and incorporate a resistor or capacitor for starting purposes. Often, the start winding is disabled after motor startup by a centrifugal switch or positive thermal coefficient thermistor. Keeping the start winding engaged can increase the torque supplied by the motor.
The application targeted here is a refrigeration compressor. In this design, the specifications called for both the start and run windings to be energized continuously when the motor is running. The initial phases only require the motor to be driven open loop, without any feedback.
PLATFORM
The hardware platform for this control design is International Rectifier's IRMCS3043 Reference Design Kit, which includes the IRMCF343 motor control IC and the IRAMX16UP60A 3-phase inverter module in a single shunt configuration. (This kit also includes PFC, but it was not used for this experiment and is not shown here.) The single shunt resistor provides current sensing for inverter protection (as well as for current feedback for closed loop motor control).
The IRMCF300 series of motor control ICs feature the Motion Control Engine (MCE), which contains hardware implemented motor control calculation as well as a programmable layer for customized algorithm elements. The custom program is defined by a graphical user interface where mathematical and control blocks can be connected together to implement the design. A compiler takes the block diagram as input and outputs a program that can be run on the MCE.
Fig. 1 shows the system components and connection to the motor. The starting capacitor has been removed and three terminals are available to drive the single-phase induction motor: Start, Run and Common corresponding to the start winding, run winding and the common connection point between them. Each terminal is connected to an inverter phase.
CONTROL ALGORITHM
With two windings 90° out of phase with each other, optimal torque is produced by exciting the coils with sinusoidal currents which have the same phase relation. However, the inverter provides a voltage to the terminals and the impedances seen in the motor will determine the current amplitude and phase. These impedances will vary with the drive frequency and load, and are also different between the start and run windings. Therefore, the control algorithm should be able to provide an arbitrary voltage amplitude and phase across each of the two windings.
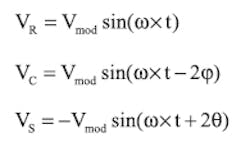
To do this, start by considering the voltages applied at each terminal in the general situation where Vstart leads Vrun by π/2 + θ, and Ï is undetermined. The terminal voltages are:
The resulting voltages across the start and run windings are now:
These voltages have the correct phase relation to each other, so that given the ratio of the voltage amplitudes:
The final parameter, Ï, can now be determined:
In this design, the voltages provided by each inverter phase are equal, though the currents may not be.
So far, this is just trigonometry. The terminal voltages ramp in a V/Hz fashion. An additional algorithm component of a voltage boost, useful to achieve higher starting torque, is shown in Fig. 2. Also, an initial frequency can be specified to further refine the starting process.
At this point, the control structure can be designed and implemented into the IRMCF343. The control was created by putting together a block diagram using the graphical math and control library, which is part of the iMotion design software. The motor drive frequency is the input to the controller. The drive frequency is ramped at a configurable rate to generate the speed command. The speed command is integrated to give the instantaneous phase angle reference of the drive voltages. The voltage amplitude is determined by gain and boost parameters. Finally, the instantaneous phase voltages (and therefore inverter modulation levels) for each motor connection node are generated by vector rotation by the appropriate angles. Configurable parameters provide the phase angle differences for the Common and Start terminals. The modulation levels are fed to the internal hardware modulator of the IRMCF343 to produce the inverter drive signals.
TEST RESULTS
The control algorithm described above was tested using a commercially available compressor connected to a closed loop refrigeration system that included an evaporation coil and condenser coil.
After some testing and tuning, a set of parameters was achieved which could reliably start the compressor up to 60psi at the outlet port:
Vstart/Vrun= 0.9
Vrun = 200Vpeak
Vboost = 100Vpeak
Vstart leading Vrun by π/2
Ramp from 30 to 60Hz drive frequency at 4Hz/s
300V DC Bus
Fig. 3 shows the winding currents of the compressor after several minutes of operation. The currents have approximately the right amplitude ratios. The evaporator coil duly become cold and gathered condensation. However, many improvements could be made to this system, discussed below.
It can be seen in Fig. 3 that the currents in the windings are not sinusoidal. This may be due to the inherent characteristics of the motor or non-optimal drive voltages. Detailed characterization of the motor would be required to understand this issue.
Also, the winding currents are not quite offset by 90°. Manipulating the parameter TwoTheta may be able to bring them into the right phase relation.
The maximum starting torque in this design is also a limitation. Under outlet pressure higher than 60 psi, the motor does not start reliably. Further tuning of the drive parameters may be able to improve this. For example, the voltage could ramp up to the maximum voltage before reaching maximum frequency. Adding a simple limit on the modulation (and adjusting the VHz_Gain) can achieve this. Another possibility is to increase the boost voltage, though in this hardware it produced overcurrent faults.
In this algorithm, the phase angle and voltage ratio between the start and run windings are fixed. However, the impedance of the windings varies with both speed and load. Some scheduling of the drive parameters TwoTheta and TwoPhi can help ensure that the motor currents have the right phase relation over the whole frequency range of operation that can increase the starting torque and improve efficiency.
On the hardware side, the inverter could be redesigned to optimize for the unequal currents flowing through each phase.
Alternatively, modifying the motor design could improve the system. If the start and run windings were identical, then it would facilitate moving to closed loop control in the future.
Related Articles
IGBTs For Three-Level Inverters Can Meet Energy-Efficient Design Needs
When we speak of efficiency, we are referring mainly to electrical efficiency. This usage, however, is a restriction of the meaning of the word efficiency...
Transfer Molded DIP-IPM Package Improves Thermal Performance
The transfer molded DIP-IPM was first introduced in 1998 to address the rapidly growing demand for cost-effective motor control in consumer appliance...
Monolithic 500-V, 1-A Three-Phase Motor Drive IC Fits SMT SOP
Manufactured using a SOI (silicon-on-insulator) process, an inverter IC consists of lateral IGBTs, HVICs, control and protection circuits all implemented on a single chip....
About the Author
Husain
Ali
Comment About the Article
To join the conversation, and become an exclusive member of Electronic Design, create an account today!

Leaders relevant to this article: