Magnetic Angle Position Sensors Elicit Efficient, Energy-Saving Motor Control
This file type includes high-resolution graphics and schematics when applicable.
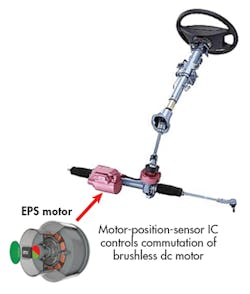
In the seemingly endless quest for higher motor performance and improved system cost efficiencies, motor manufacturers are increasingly adopting a new trend: Replacing multiple magnetic Hall-effect latch sensor devices with a single Hall-effect magnetic angle sensor device for motor-commutation feedback. This trend is particularly evident in the automotive and industrial markets, where use of brushless direct-current (BLDC) motors is on the rise. Another similar trend in certain automotive and industrial applications is the shift from expensive, large, and power-consuming optical encoders and resolvers to magnetic angle position sensors to provide motor-commutation feedback.
In the automotive marketplace, the shift from discrete hall-effect latches to magnetic angle position sensors for motor-control feedback has another impact: It helps OEMs meet increased vehicle safety and fuel-efficiency regulations, as well as overall vehicle reliability. By eliminating multiple magnetic latch devices inside a motor, as well as their associated passive components and interconnects, magnetic angle position sensors improve the motor’s performance and reliability, in addition to increasing the vehicle’s overall safety (Fig. 1).
Today, new magnetic angle sensor devices being introduced to the marketplace are specifically designed for high-speed motor applications. These devices include innovative features that further boost motor performance, e.g. shaft torque and rotational speeds, and reduce system costs.
For example, one of ams’ recently released magnetic angle position sensors, the AS5147P, includes a patented feature that offloads motor controllers from performing a task that they would otherwise have to do using discrete Hall latches or competitive magnetic angle position sensors. By using the AS5147P’s on-chip Dynamic Angle Error Compensation (DAEC) feature, a motor controller needn’t account for sensor and system propagation delays that can negatively affect a motor’s performance and power requirements.
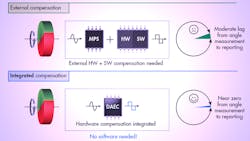
Dealing with Lag
Typically, motor controllers, or processors, have to account for the lag between when the motor-commutation feedback sensor(s) measures the motor’s rotational shaft position, and when it actually reports it to the controller. This lag, due to propagation delay through the magnetic sensor, and between the sensor and processor interface, translates into a measurement position error. And if somehow it’s not accounted for in the motor-control system, it will lead to reduced motor performance and efficiency.
The magnitude of this problem is directly proportional to the motor RPM rate. Meaning, the higher a motor’s RPM rate, the more the intrinsic sensor and interface propagation delay—and the resulting associated lag—negatively impact the motor’s performance.
Traditionally, motor controllers account for this lag time by running a software algorithm every time the controller receives a new measurement update from the motor-commutation feedback sensor. By already having a fairly accurate idea of the rotating motor shaft’s angular speed, and knowing the intrinsic sensor and interface propagation delay, the motor controller’s software algorithm approximates the real-time angular position of the rotating motor shaft, relative to when it actually receives the sensor’s data. It does this by summing the sensor measurement with an offset value.
Solving by Summing
With the AS5147P’s DAEC feature (Fig. 2), the position sensor is also able to determine the motor’s rotating shaft speed, in addition to knowing its own internal propagation delays, as well as that of the interface. Like the motor controller, by summing the sensor’s actual measurement with an offset value, it can effectively present real-time angular positional information of the rotating motor shaft to the motor controller, thus eliminating the lag effect.
Furthermore, the AS5147P device can do this task much more accurately in its dedicated circuits than the motor controller, since it’s making the measurements and adding the offsets entirely off of its own synchronous clock domain. When a motor controller performs this task, timing ambiguities exist between the sensor and the controller, since the controller and the sensor run off their own internal and asynchronous clocks. This timing ambiguity translates into less-accurate lag offset calculations when the controller and its software are performing this function.

Thus, the AS5147P can provide more accurate motor-commutation feedback position information to the motor controller, which translates into overall higher motor performance and improved power efficiency. Moreover, it can do this function much more quickly and often. As a result, the sensor can support higher motor RPM rates of up to 28,000 rpm.
Stray-Field Immunity Edge
Another advantage of using magnetic angle position sensors in motor-commutation feedback applications is that they, along with their interconnect, can be more easily designed to be immune to magnetic stray fields—a common concern with BLDC motors that have internal magnetics for their rotors and high electrical currents flowing through their stator windings. Magnetic stray fields impinging on a Hall-effect motor-commutation sensor and its interconnect can degrade the sensor’s measurement accuracy and lead to the motor not working properly, or at all.
With common magnetic angle position sensors, shielding can be included in the motor system design to prevent the magnetic sensor(s) and their interconnects from being impacted from any magnetic stray fields. Alternatively, special mechanical design methods and careful attention to the placement of the Hall sensors and their interconnects can be done to prevent performance degradation. However, both shielding techniques increase development times and unit costs.
A magnetic angle position sensor like the AS5147P offers an alternative and better solution to the magnetic stray-field concern and shielding costs, since they’re immune to magnetic stray fields. Thus, no magnetic shielding or added attention to sensor and related interconnect placement are required. Not only does it save on motor-system costs, but it also delivers precise and repeatable position measurements at all times, even in the harshest of magnetically noisy environments.
In summary, with the world’s insatiable need for more electrical motors and the relentless pursuit for higher motor performance and reduced power consumption, we will likely see more manufacturers make the shift from multiple discrete Hall-effect sensors, resolvers, and optical encoders to high-performing and cost-effective magnetic angle position sensors. And as new system challenges arise, smart magnetic angle position sensors will evolve and integrate new features to meet those demands.

About the Author
Mark Donovan
Senior Product Marketing Manager, Position Sensors
Mark Donovan is a Senior Product Marketing Manager for ams AG’s Position Sensors business line. Mr. Donovan has more than 30 years of industry experience in magnetic sensing, telecom, and radar signal processing, and holds eight patents in magnetic position sensing, radar signal processing, and telecom communications. He holds a Bachelor of Science in Electrical Engineering from the University of Massachusetts, Lowell, as well as an MBA from Southern New Hampshire University.
Comment About the Article
To join the conversation, and become an exclusive member of Electronic Design, create an account today!

Leaders relevant to this article: