EtherCAT: The Backbone of Autonomous Mobile Robots
What you'll learn:
- How EtherCAT’s “processing on the fly” and distributed clocks enable deterministic control for AMRs.
- How line, tree, and ring topologies (including single-cable redundancy) simplify robot wiring.
- How safety layers such as TwinSAFE and FSoE can carry functional safety over the same EtherCAT network.

If you’ve ever seen a factory robot arm move with perfect precision or watched an automated conveyor belt work in perfect rhythm, you’ve witnessed the power of real-time communication in action. Behind these smooth operations is a powerful technology called EtherCAT, short for Ethernet for Control Automation Technology.
EtherCAT has been largely adopted in the industrial space over the past couple of decades. However, it’s seen similar adoption in autonomous mobile robots that can include multiple degrees of freedom over multiple motors. That’s due to EtherCAT’s strict timing requirements and multi-sensor constellation.
EtherCAT Builds in Flexibility
Thanks to the ability to add multiple nodes over the same bus and support of different topologies facilitates the wiring in a product where space is always a problem. EtherCAT networks are flexible. They can be arranged in line, tree, or ring topologies. Using standard Ethernet cables and connectors keeps costs low and setup simple. With just two pairs of twisted cables, a device supporting EtherCAT usually has an EtherCAT In and EtherCAT Out port in their communication chain that helps daisy-chain multiple devices on the same line of cables.
Plenty of off-the-shelf devices that support analog inputs and digital input/outputs can sit on the EtherCAT chain. All such functionalities could be executed at a safety integrity level (SIL) as well.
EtherCAT, developed by Beckhoff Automation in the early 2000s, is now maintained by the EtherCAT Technology Group (ETG), which includes hundreds of automation and robotics companies worldwide. Apptronik, Boston Dynamics, and KUKA are some of the well-known robotics companies called out as members on the ETG website. It’s seen widespread adoption in the academic field as well.
EtherCAT vs. Ethernet
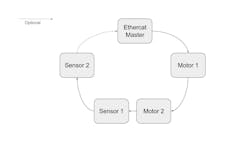
What makes EtherCAT different from regular Ethernet (the kind your computer uses) is how it handles data. Instead of sending separate messages to each device and waiting for replies, EtherCAT sends one big message that passes through all devices in a chain. Each device reads what it needs and adds its own information while the message keeps moving (see figure).
In everyday networking, a small delay doesn’t matter much. But in automation, where inputs from sensor data and output in the form of motor driving — all being handled within a very narrow timeframe (e.g., automotive manufacturing lines, sorting centers) — even a delay of a few milliseconds can cause things to fall out of sync.
EtherCAT was designed for real-time performance. The host device sends out a frame of data. Each slave device reads and writes data while the message flows through the network. When the frame reaches the end, it loops back to the master with all updated information.
Because everything happens on the fly, the communication is extremely efficient, with almost no delay. The communication line from the last device on the device tree can be looped back to the host machine to provide redundancy in cabling if there’s a splice or cut in the chain.
Communication of safety functions over the same physical interface using a safety-certified software stack such as Twinsafe and FSOE provides an added advantage. In case there’s a need for a safety intervention in operation, the host system, through the physical medium of EtherCAT, can initiate safe states within the actuators to come to a safe position and prevent any major incidence. With the AMR safety standard leaning toward IEC 61508, this becomes a key aspect in large-scale adoption of robots.
Hardware Stack Considerations
While EtherCAT offers plenty of advantages, there are a few factors to consider when it comes to choosing your hardware stack. Not all sensors support EtherCAT, and incorporating the functionality requires additional space and power. Most of the available devices are supported either through CAN or UART; EtherCAT needs another board for conversion.
Other considerations are the type of CPU cores and operating system of your host machine, specific timing requirements, network interface card (NIC) on the physical layer, and the need for cable redundancy in your network topology.
Only time will tell how quickly EtherCAT is adopted as the mobile robot population rapidly expands. Nonetheless, its intent is to help promote the safety and ease of use for these robots.
About the Author

Amit Arvind Nene
Senior Electrical Architect, Collaborative Robotics
Amit Arvind Nene is a Senior Electrical Architect at Cobot - Collaborative Robotics Inc. He specializes in hardware architectures for computer vision and artificial intelligence applications. Previously, Amit held the position of Senior Electrical Engineer at Grabango, focusing on high-resolution camera design and advanced system-on-module (SoM) and system-on-chip (SoC) solutions.
Amit holds a Master's degree in Electrical Engineering from Missouri University of Science and Technology and a Bachelor’s degree in Electronics and Telecommunication from Maharashtra Institute of Technology.
Comment About the Article
To join the conversation, and become an exclusive member of Electronic Design, create an account today!

Leaders relevant to this article: