What’s the Difference Between Passive and Active Power-Factor Correctors?
This article is part of the Power Management Series: What’s the Difference Between Watts, RMS, and More?
Download this article in .PDF format
Every day, the amount of electronic devices using switched-mode power supplies increases. As a result, power-factor correction has become a very significant issue, leading to the creation of regulatory standards. Thanks to those standards, design/application engineers are using the latest technologies in passive and active components and controller integrated circuits (ICs) to create a wide range of power-factor correctors.
Power Factor
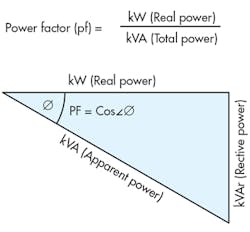
Let’s start by talking about the concept of power factor (PF). Assuming perfectly a linear load with ideal sine-wave power, the power factor of an electrical power system is the ratio between the real power (kW) to the apparent power (kVA) (Fig. 1).
It can also be defined as the cosine that represents the phase angle between the current and the voltage waveforms. The value of the power factor can range from 0 to 1. When the current and the voltage are in phase, the power factor is 1.
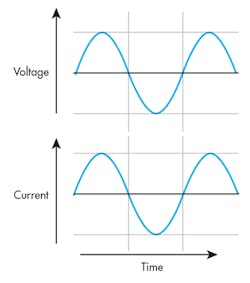
Ideal sinusoidal waves usually occur when the loads are composed of resistive, capacitive, and inductive elements that are linear (invariant with current and voltage). This type of power factor is typically associated with industrial equipment, such as electrical motors (Fig. 2).
Nowadays, it is very common to find power factor that draws current in a non-sinusoidal waveform (Fig. 3) among electronic devices with nonlinear loads. Such electronic devices use power transformation for better control or to save energy. Such power transformation is achieved by using switched-mode power supplies, which are typically found in PCs, audio-visual equipment, fluorescent lighting, dimmers, copier machines, battery chargers, etc.
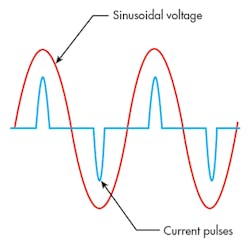
Figure 3 shows that the current and the voltage are perfectly in phase even though there is a severe distortion of the current wave. Applying the “cosine of the phase angle” would lead to a wrong conclusion that this power supply has a power factor of 1.0. In this case, the power factor should be analyzed in terms of the power-line fundamental frequency’s harmonic series. Taking into account the absolute values of total harmonic distortions (THDs), a power factor for nonlinear loads could be defined as seen in Fig. 4.
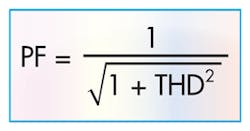
A power factor that is not equal to unity could cause harmonic distortion. Such distortion might interfere with other devices being powered from the same source. Looking at Fig. 4, we can say that to achieve a power factor of 1.0, the THD value should be zero. Harmonic distortion can cause serious problems, such as damage to cabling and other equipment within networks as well as overheating and fire risk, high voltages and circulating currents, equipment malfunctions and component failures, etc.
Power-Factor Corrector
Power-factor correction (PFC) is used to avoid input current harmonics, thereby minimizing interference with other devices being powered from the same source. In Europe and Japan, electrical equipment must comply with standard IEC61000-3-2. This standard applies to most electrical appliances with input power over 75 W (Class D equipment). It also specifies the maximum amplitude of line-frequency harmonics up to and including the 39th harmonic.
There are no standards in the United States for limiting the harmonic current emissions emitted by electric equipment like there is in Europe (IEC6100-3-2). However, an initiative called 80 PLUS is trying to integrate more efficient power supply units, especially for desktop computers, servers, and laptops.
80 PLUS certifies to more than 80% energy efficiency at 20%, 50%, and 100% of the rated load. To meet the 80 PLUS certification, PSUs require a PFC of 0.9 or greater at 100% load. This means PSUs that waste 20% or less electric energy (as heat at the specified load levels) will lead to reduced electricity consumption and lower bills. Rebates are sometimes given to manufacturers who use 80 PLUS certified PSUs.
Types of Power-Factor Correctors
Two types of power-factor correctors are used to reduce harmonic distortion: passive PFC and active PFC.
As the name implies, a passive PFC uses passive components to correct poor power factors (e.g., inductors and capacitors). Passive PFC corrects the power factor to 0.7-0.85. Here are the most common types of passive PFCs:
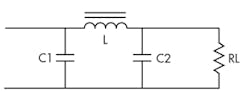
1. Capacitor input filter: Also called the pi filter, it removes unwanted frequencies from a signal. The filter reduces the harmonic content of a current waveform by making sure that the cut-off frequency of the filter is just above the fundamental frequency. As a result, the optimum attenuation of harmonics can be achieved (Fig. 5).
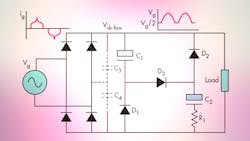
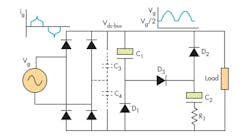
2. Valley-fill PFC: This power-factor corrector can be used in low-power applications, where a high effective ripple voltage on DC output can be tolerated. It is frequently used in electronic ballast applications. The circuit contains two capacitors and three diodes. The two capacitors are charged in series around the line peak to half of the peak line voltage. When the line voltage falls below the single capacitor voltage, the bridge rectifier diodes are reversely biased, which doesn’t allow current to flow. Valley-fill’s diodes then conduct and the capacitors are connected in parallel to feed the load. Figure 6 shows a conventional valley-filled circuit.
The passive techniques normally use a simple line-frequency LC filter to both extend the current conduction angle and reduce the THD of the input current of the diode-capacitor rectifier. Due to its simplicity, the passive LC filter is a high-efficiency and low-cost PFC solution that could potentially meet the IEC 61000-3-2 class D specifications in the low-power range. At higher power levels, however, the size and weight of the passive components become a problem because of the presence of heavier and bulkier filter inductors. The passive techniques have certain advantages, such as simplicity, reliability and ruggedness, insensitivity to noise and surges, no generation of high-frequency electromagnetic interface (EMI), and no high-frequency switching losses.
Active PFCs use active electronics circuits, which contain devices like MOSFETs, BJTs, and IGBTs. There is a wide range of topologies for active PFCs, and electronic/power supply designers are able to create circuits with different modes of operations and different challenges as technology evolves. Here are two basic types of active PFCs:
1. Boost: This popular implementation, which also is called a step-up converter, is a power converter with an output dc voltage greater than its input dc voltage. This class of switching-mode power supply (SMPS) contains at least two semiconductor switches and at least one energy-storage element. Filters are normally added to the output of the converter to reduce output voltage ripple. Because power must be conserved, the output current is lower than the input current.
Almost all boost PFCs utilize a standard controller chip for the purposes of ease of design, reduced circuit complexity, and cost savings (Fig. 7).
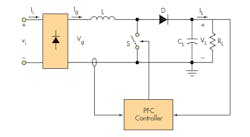
When the switch (S) is closed, the inductor output is connected to ground and the voltage (Vi) is placed across it. The inductor current increases at a rate equal to Vi/L. When the switch is opened, however, the voltage across the inductor changes and is equal to VL-Vin. Current that was flowing in the inductor decays at a rate equal to (VL-Vi)/L.
The filter inductor on the input side is the main advantage of boost PFCs because it allows low-distorted input currents that prevent the reduction of the power factor value. A disadvantage to this approach is that the output voltage is always greater than the peak input voltage. In addition, there is a lack of current limitation during overload and short-circuit conditions, due to the direct connection between line and load.
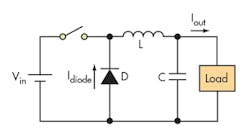
2. Buck: This voltage step-down converter and current step-up converter operates on the principal of storing energy in an inductor. There is a switching element (a power MOSFET or IGBT) that can be either opened or closed (Fig. 8).
When the switch is in the ON position (i.e., MOSFET onâstate), the in-rush of current flows to the load and energy is stored in both the inductor (L) and the capacitor (C) and no current flows through the diode as it is reverse-biased. When the switch is in the OFF position, the energy stored in (L) is released back into the circuit and the current flows via the load and diode. At some point when the load voltage begins to fall, the charge stored in C becomes the main source of current until the switch is ON again.
Buck converters can be very efficient (95% or higher for integrated circuits).
Conclusion
Power-factor correctors have evolved significantly because of an increased interest in complying with standards like IEC61000-3-2 (harmonic reduction), EMI limits, and others. They have improved and become more cost-effective due to better integrated-circuit controllers.
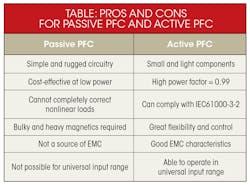
The main difference between passive and active PFCs is simply the use of passive components versus using mostly active components with controller integrated circuits. Both can achieve power-factor corrections at different levels. Depending on the design efficiency, cost, and topology, they could be used in wide variety of applications. (See table.)
Read more from the Power Management Series: What’s the Difference Between Watts, RMS, and More?
Download this article in .PDF format
References:
- P. Parto, K. Smedley, “Passive PFC for Flyback Convertors”, University of California.
- L. Rossetto, G. Spiazzi, P. Tenti, “Control Techniques for Power Factor Correction Converter”, University of Padova, 1994.
- On Semiconductors, “Power Factor Correction (PFC) handbook”.
- Artesyn, “Power Factor Correction”.
- Vicor, “Active PFC for Electronic Power Supplies”.
- Fairchild Semiconductor , “Power Factor Correction Basics”.
- Infeon, “Power Factor Corrections Parts Selection Guide”.
About the Author
Maria Guerra
Power/Analog Editor
Maria Guerra is the Power/Analog Editor for Electronic Design. She is an Electrical Engineer with an MSEE from NYU Tandon School of Engineering. She has a very solid engineering background and extensive experience with technical documentation and writing. Before joining Electronic Design, she was an Electrical Engineer for Kellogg, Brown & Root Ltd (London. U.K.). During her years in the Oil and Gas Industry she was involved in a range of projects for both offshore and onshore designs. Her technical and soft skills bring a practical, hands-on approach to the Electronic Design team.
Comment About the Article
To join the conversation, and become an exclusive member of Electronic Design, create an account today!

Leaders relevant to this article: