How to Easily Design Power Supplies (Part 1)
This article is part of the Power Management series: How to Easily Design Power Supplies
Members can download this article in PDF format.
What you'll learn:
- How switch-mode power supplies changed the power-supply design space.
- The isolation factor in power supplies: galvanic isolation vs. non-isolated.
- Most common non-isolated topologies.
This series gives an overview of the possibilities for power-supply design. It will address the basic and commonly used isolated and non-isolated power-supply topologies along with their advantages and disadvantages. Also covered will be electromagnetic interference (EMI) and filtering considerations. This mini tutorial aims to provide a simplified understanding and renewed appreciation for the art of power-supply design.
Most electronic systems require some sort of voltage conversion between the voltage of the energy supply and the voltage of the circuitry that needs to be powered. As batteries lose charge, the voltage will drop. Some dc-dc conversion can ensure that much more of the stored energy in the battery is used to power the circuitry. Furthermore, for example, with a 110-V ac line, we can’t power a semiconductor such as a microcontroller directly.
Since voltage converters, also named power supplies, are used in almost every electronic system, they have been optimized for different purposes over the years. Certainly, some of the usual targets for optimization are solution size, conversion efficiency, EMI, and cost.
The Simplest Power Supply: The LDO
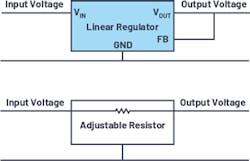
One of the simplest forms of a power supply is the low-dropout (LDO) regulator. LDOs are linear regulators as opposed to switching regulators. Linear regulators put a tunable resistor between the input voltage and the output voltage, which means the output voltage is fixed independent of how the input voltage changes and which load current is running through the device. Figure 1 shows the basic principle of this simple voltage converter.
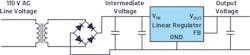
For many years, a typical power converter consisted of a 50- or 60-Hz transformer, connected to the power grid, with a certain windings ratio to generate a non-regulated output voltage—a few volts higher than the needed supply voltage in a system. Then, a linear regulator was used to convert this voltage to a well-regulated one as needed by the electronics. Figure 2 shows the block diagram of this concept.
The problem with the basic setup in Figure 2 is that the 50-/60-Hz transformer is relatively bulky and expensive. Moreover, the linear regulator dissipates quite a lot of heat, so the total system efficiency is low and getting rid of the generated heat is difficult with high system power.
Switch-Mode Power Supplies to the Rescue
To avoid the disadvantages of a power supply as shown in Figure 2, switch-mode power supplies (SMPS) were invented. They don’t rely on 50- or 60-Hz ac voltage. SMPS take a dc voltage, sometimes rectified ac voltage, and generate a much higher-frequency ac voltage to use a much smaller transformer. In non-isolated systems, they can rectify the voltage with an LC filter to generate a dc output voltage.
The advantages of SMPS are small solution size and relatively low cost. The ac voltage being generated doesn’t need to be a sine voltage waveform. A simple PWM signal shape will work just fine and is easy to generate with a PWM generator and a switch.
Up until the year 2000, bipolar transistors were the most commonly used switches. They would work well but had relatively slow switching transition speed. They weren’t very power-efficient, limiting the switching frequency to 50 kHz or maybe 100 kHz.
Today, we use switching MOSFETs instead of bipolar transistors, allowing for much faster switching transitions. This, in turn, gives us lower switching losses, allowing for switching frequencies of up to 5 MHz. Such high switching frequencies enable the use of very small inductors and capacitors in the power stage.
Switching regulators bring many benefits. They generally deliver power-efficient voltage conversion, enable voltage step-up and step-down, and offer relatively compact and low-cost designs. The disadvantages are that they’re not so simple to design and optimize, and they generate EMI from the switching transitions and the switching frequency. The availability of SMPS regulators, along with power-supply design tools such as LTpowerCAD and LTspice, have greatly simplified this difficult design process. With such tools, the circuit design process of a SMPS can be semi-automated.
Isolation in Power Supplies
When designing a power supply, the first question should be whether or not galvanic isolation is required. Galvanic isolation is used for multiple reasons. It can make circuits safer; allows for floating system operation; and prevents noisy ground currents from spreading through different electronic devices in one circuitry. The two most common isolated topologies are the flyback and forward converters. However, for higher power, other isolated topologies are employed, such as push-pull, half-bridge, and full-bridge.
If galvanic isolation isn’t required, then in most cases a non-isolated topology is used. Isolated topologies always require a transformer, which tends to be expensive, bulky, and often difficult to get off-the-shelf with the exact requirements of a custom power supply.
Most Common Topologies When Isolation Isn’t Required
Buck
The most common non-isolated SMPS topology is the buck converter. It’s also known as the step-down converter. It accepts a positive input voltage and generates an output voltage lower than the input voltage. The buck converter is one of the three most basic SMPS topologies that only require two switches, an inductor, and two capacitors.
Figure 3 shows the basic principle of the buck-converter topology. The high-side switch pulses a current from the input and generates a switch-node voltage alternating between the input voltage and ground voltage. The LC filter takes that pulsed voltage on the switch node and generates a dc output voltage. Depending on the duty cycle of the PWM signal controlling the high-side switch, a different level of dc output voltage is generated. This dc-dc buck converter is very power efficient, relatively easy to build, and requires few components.

The buck converter pulses current on the input side, while the output side has continuous current coming from the inductor. This is the reason why a buck regulator is very noisy on the input side and not so noisy on the output side. Understanding this is important when low-noise systems must be designed.
Boost
Besides the buck topology, the second basic topology is the boost, or step-up, topology (Fig. 4). It uses the same five basic power components as the buck converter, but rearranged, so that the inductor is placed on the input side and the high-side switch is placed on the output side. The boost topology is used to step up a certain input voltage to an output voltage that’s higher than the input voltage.
When selecting a boost converter, it’s important to note that boost converters always specify the maximum rated switch current and not the maximum output current in their datasheets. In a buck converter, the maximum switch current is directly related to the maximum achievable output current, independent of voltage ratio between the input and output voltage. In a boost regulator, the voltage ratio directly affects the possible maximum output current based on a fixed maximum switch current. When selecting a suitable boost regulator IC, you need to not only know the desired output current, but also the input and output voltage of the design in development.

A boost converter is very low noise on the input side because the inductor in line with the input connection prevents rapid changes in current flow. However, on the output side, this topology is quite noisy. We only see pulsed current flow through the outside switch, and thus output ripple is more of a concern compared to the buck topology.
Buck-Boost
The third basic topology, only consisting of the five basic components, is the inverting buck-boost converter (Fig. 5). The name is derived from the fact that this converter takes a positive input voltage and converts it into a negative output voltage. Besides this, the input voltage may be higher or lower than the absolute of the inverted output voltage. For example, –12 V output voltage may be generated out of 5 V or 24 V on the input. This is possible without making any special circuit modifications.

In the inverting buck-boost topology, the inductor is connected from the switch node to ground. The input side as well as the output side of the converter see pulsed current flow, making this topology relatively noisy on both sides. In low-noise applications, this nature is compensated by adding additional input and output filtering.
One quite positive aspect of the inverting buck-boost topology is the fact that any buck switching regulator IC may be used for such a converter. It’s as simple as attaching the output voltage of the buck circuit to system ground. The buck IC circuit ground will become the adjusted negative voltage. This trait leads to a very large selection of switching regulator ICs on the market.
In the next part of this series, we will cover specialized topologies, common isolated topologies, and advanced isolated topologies.
Read more articles in the Power Management series: How to Easily Design Power Supplies
About the Author

Frederik Dostal
Power-Management Technical Expert
Frederik Dostal is a power-management expert with more than 20 years of experience in this industry. After his studies of microelectronics at the University of Erlangen, Germany, he joined National Semiconductor in 2001, where he worked as a field applications engineer, gaining a lot of experience in implementing power-management solutions in customer projects. During his time at National, he also spent four years in Phoenix, Arizona (USA), working on switch-mode power supplies as an applications engineer.
In 2009, he joined Analog Devices, where since then he held a variety of positions working for the product line and European technical support, and currently brings in his broad design and application knowledge as a power-management expert. Frederik works in the ADI office in Munich, Germany.
Also check out my: