GaN Powers High-Efficiency Motor Joints in Humanoid Robots
What you'll learn:
- How humanoid robots use high-performance motors to replicate precise, coordinated human movement.
- Why high-frequency GaN power stages enable compact, efficient motor drives inside tightly packed robotic joints.
- How fast current, speed, and position control loops ensure balance, torque accuracy, and real-time motion stability.
With fully-body humanoid robots on the rise, the motor controllers, power electronics, and cooling systems that keep them moving must deliver more power, more precision, and more efficiency than ever.
To replicate a similar range of motion as a human, approximately 40 servo motors — often permanent magnet synchronous motors (PMSMs) or brushless DC (BLDC) motors — are usually deployed throughout the robot. The motors are distributed through different parts of the body, primarily located in the neck, torso, arms, legs, toes, and other joints, excluding the hands. To simulate a human’s dexterity, a single robotic hand can integrate more than 10 additional motors to control individual fingers and grasping mechanisms.
The power demands of these motors vary depending on their specific functions. The motors driving the delicate manipulation of the wrist or fingers possibly only require several amps, while motors embedded in hips or knees can require more than 100 A to handle the full body weight. In most cases, these robots run on a 48-V power distribution architecture, with each power board delivering around 500 W to 1 kW to the motors. At such power levels, thermal management is a top challenge
Given the rising demands for power density, these motors must be compact, lightweight, and efficient to fit within human-sized joints while still enabling the precise movements of humans. High-bandwidth, real-time control often facilitated by field-oriented control (FOC) is critical for coordinating the motion of different joints to maintain balance. At the same time, accurate position sensing — provided by compact sensors in each joint — is key to keeping movement smooth and adroit.
The GaN Plan for Motor Design
Gallium nitride (GaN) is increasingly being used to tackle these unique demands, said Ryan Wang, director of systems engineering and marketing at Texas Instruments. Thanks to their lower switching losses, GaN power FETs can handle pulse-width-modulation (PWM) frequencies of over 100 kHz, which allows for more accurate motor control.
>>Check out more of our CES 2026 coverage, as well as the TechXchange for similarly themed articles and videos

Equally important is GaN’s ability to maintain high efficiency without creating excessive heat. This makes it easier to fit the power electronics into tightly packed motor joints.
In the video above, TI highlights its GaN power stages, with each one integrating a half-bridge and a gate driver into a single package, reducing footprint by more than 50% compared with MOSFET alternatives. The demo features a robotic arm driven by a pair of GaN-based power boards: the first one is designed to drive the motor embedded in the elbow joint, while the second controls the finger joints in the hand.
The power boards are also both based on TI’s C2000 real-time microcontrollers (MCUs). The motor controller embedded in the elbow joint of the robot controls the three half-bridges delivering power to the three-phase motor. TI said the MCUs communicate with the rest of the system over EtherCAT, a real-time, industrial-grade connectivity technology based on Ethernet and adopted in industrial automation.

“The most important thing for a robotics arm joint is to make it as small as possible and also as high efficiency as possible” without losing the ability to do accurate, dynamic control of speed, torque, and position, said Wang.
The Motor-Control Challenge Inside Every Humanoid Robot Joint
For the motors embedded deep inside each joint, motor control is typically separated into several control-loop layers: the torque loop, the speed loop, the position loop, and the motion-control loop that coordinates them all. The control loops further up the line provide input references to those further down the line. As a result, each control loop depends on the one before and after it, and each must meet real-time processing requirements to keep the robot’s movements smooth and balanced.
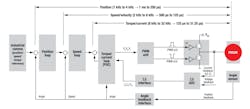
The torque loop — also called the current loop — is the linchpin of the system. The current loop directly regulates the torque of the motor, in most cases operating at the same switching frequency as the FET in the power stage, around 8 kHz to 32 kHz. All other control loops operate at lower frequencies. The speed of the current loop directly affects the accuracy and response times of the motor, according to TI.
A humanoid robot taking even a single step involves the coordinated control of as many as 40 motor joints to enable precise motion and good balance. If the movement of even one joint is delayed, the balance can be thrown off. To synchronize all of the motors in the body while maintaining the robot’s overall stability, the motor controller in every joint must be able to achieve high accuracy and fast response times, said TI.
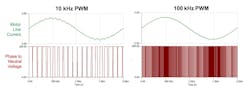
These demands can be met by increasing the speed of the control loop and the PWM frequency. A switching frequency in the 100-kHz range can achieve a higher-resolution motor current, which corresponds to less current ripple and more accurate control. A high-resolution current waveform also means a better current sinusoidally, which improves efficiency and reduces heat.
While DC-DC converters need higher bandwidth than that, motor-control algorithms primarily operate on average current, making the bandwidth demands more relaxed.
In addition, increasing the PWM frequency can shrink the DC bus capacitor in the system. Higher frequencies also reduce the required bus capacitance, allowing large cylindrical electrolytic capacitors in traditional power stages to be replaced with smaller ceramic capacitors.
The power FETs within the motor periodically draw current from the bus capacitor with the PWM signal. When PWM frequency is increased, the amount of charge drawn at a time decreases, which reduces the required bus capacitance.
TI explained that even increasing the PWM frequency from 20 to 80 kHz enables an electrolytic capacitor to be replaced by a ceramic capacitor of equal capacitance to obtain a similar bus voltage ripple.
However, the shift to higher switching frequencies and faster current loops can create new challenges. For MOSFET-based power drivers, doing nothing else besides increasing PWM switching frequency may bring large additional losses, leading to overheating. For instance, increasing switching frequency even slightly from 10 to 20 kHz can increase the overall loss by 20% to 30%, according to TI. These inefficiencies pose difficulties for battery-powered humanoid robots.
GaN Rewrites the Power Rules for Humanoid Robotics
GaN is a potential solution due to its unique power-handling properties, which allow for lower switching losses at high frequencies. GaN power devices have smaller gate capacitance (Cg) and smaller output capacitance (COSS), allowing them to achieve up to 100X faster switching speeds than silicon MOSFETs, said TI.
With faster turn-off and turn-on times, GaN power devices can be operated with dead times in the 10 to 20 ns range, while silicon MOSFETs tend to require longer dead times of around 1 us. Reduced dead time results in lower switching losses.

Additionally, GaN FETs don’t have a body diode. In high-frequency switching scenarios, the body diode of a MOSFET causes large reverse-recovery losses. By eliminating the body diode, GaN power devices lower the risk of switch node ringing and electromagnetic interference (EMI) usually caused by it. TI said that helps prevent noise from interfering with the other electronic systems being packed into humanoid robots.
The space within human-sized joints is also severely limited. The power board is usually a ring PCB with a diameter of only 5 to 10 cm to fit into the elbow or even smaller to fit into the fingers on a hand. In addition to power electronics, the joint must integrate the motor itself and, in many cases, several sensors, including for sensing the rotor position of the motor. In many cases, force sensors are also incorporated to determine the weight of objects being gripped or lifted by robots.
Crucially, engineers must achieve higher power and more stable motor control in this limited space. GaN helps in this regard as it has significantly lower on-resistance (RDS(on)) per unit area, enabling smaller die areas compared to silicon MOSFETs. TI said that it saves even more space by integrating the power transistors and gate driver into a single package as small as 4.5 × 5.5 mm with integrated protection features.
Integrating the gate driver with the power FETs minimizes gate ringing for more reliable operation, according to TI. The integration also reduces power loop inductance to further lower EMI and increase efficiency.
>>Check out more of our CES 2026 coverage, as well as the TechXchange for similarly themed articles and videos
About the Author

William G. Wong
Senior Content Director - Electronic Design and Microwaves & RF
I am Editor of Electronic Design focusing on embedded, software, and systems. As Senior Content Director, I also manage Microwaves & RF and I work with a great team of editors to provide engineers, programmers, developers and technical managers with interesting and useful articles and videos on a regular basis. Check out our free newsletters to see the latest content.
You can send press releases for new products for possible coverage on the website. I am also interested in receiving contributed articles for publishing on our website. Use our template and send to me along with a signed release form.
Check out my blog, AltEmbedded on Electronic Design, as well as his latest articles on this site that are listed below.
You can visit my social media via these links:
- AltEmbedded on Electronic Design
- Bill Wong on Facebook
- @AltEmbedded on Twitter
- Bill Wong on LinkedIn
I earned a Bachelor of Electrical Engineering at the Georgia Institute of Technology and a Masters in Computer Science from Rutgers University. I still do a bit of programming using everything from C and C++ to Rust and Ada/SPARK. I do a bit of PHP programming for Drupal websites. I have posted a few Drupal modules.
I still get a hand on software and electronic hardware. Some of this can be found on our Kit Close-Up video series. You can also see me on many of our TechXchange Talk videos. I am interested in a range of projects from robotics to artificial intelligence.

James Morra
Senior Editor
James Morra is the senior editor for Electronic Design, covering the semiconductor industry and new technology trends, with a focus on power electronics and power management. He also reports on the business behind electrical engineering, including the electronics supply chain. He joined Electronic Design in 2015 and is based in Chicago, Illinois.